РадиоведениеАлгоритмы обработки сигналов РСА землеобзора
Система обработки сигналов РСА обеспечивает получение необходимой информации для решения различных тактических задач: обнаружения, определения местоположения, распознавания и определения функционального состояния целей.
В большинстве случаев решение этих тактических задач выполняется в два этапа. На первом этапе процессор обработки сигналов (сигнальный процессор) РСА формирует РЛИ заданного вида (амплитудные, фазовые, скоростные, поляризационные портреты целей). На втором этапе процессор данных (ЭВМ), используя полученные РЛИ, определяет необходимые характеристики целей для решения заданной тактической задачи. На основе априорных данных о целях и изображений, полученных другими датчиками, строится изображение целей в нужном масштабе с выделением особенностей окружающей местности и объектов. Далее производится автоматическое обнаружение целей с поддержанием заданного уровня ложных тревог, осуществляется привязка изображения к земной системе координат с определением местоположения целей и рельефа местности. Завершается обработка РЛИ определением типа целей и их функционального состояния (движение, боевая работа).
Функционирование системы обработки обеспечивается набором алгоритмов решения задач (алгоритмическое обеспечение) и аппаратными средствами (аналоговыми и цифровыми процессорами и ЭВМ). Алгоритмы и эффективность решения различных тактических задач рассматриваются в последующих разделах. В данном разделе определяются алгоритмы обработки траекторного сигнала РСА землеобзора и их реализация аналоговой оптической системой обработки и цифровым процессором.
Источником информации является электромагнитное поле, отраженное от целей и принимаемое на траектории перемещения антенны РСА. В зависимости от того, какие параметры поля используются в системе обработки сигналов, различают следующие этапы (виды) обработки сигнальным процессором.
Поляризационная обработка. При полном поляризационном зондировании, когда одновременно излучаются электромагнитные волны с горизонтальной (Г) и вертикальной (В) поляризацией, приемная антенна (поляриметр) формирует четыре канала различной поляризации сигналов (ГГ , ВВ, ГВ, ВГ). Сигнал каждого канала содержит информацию о функции отражения цели при соответствующей поляризации падающей и отраженной волны. Последующая обработка сигналов четырех каналов обычно проводится после формирования РЛИ целей в каждом канале раздельно путем анализа взаимосвязей РЛИ разных каналов. Поляризационная обработка значительно повышает характеристики обнаружения и особенно распознавания целей среди множества объектов и ложных целей.
Пространственная обработка. При использовании антенной системы РСА типа ФАР с раздельным приемом сигналов в каждом элементе апертуры реальной антенны возможно формирование многоканальной синтезированной апертуры. Совместная обработка сигналов, формируемых в отдельных каналах (элементах ФАР), носит название пространственной обработки (по пространству апертуры реальной антенны). В простейшем случае все сигналы элементов ФАР суммируются когерентно, образуя однолучевую (суммарную) ДН антенны. Часто формируют одновременно суммарную и разностную ДН (моноимпульсная антенна). Возможно формирование ФАР с несколькими, разнесенными по апертуре, фазовыми центрами (каналами).
В интерферометрическш РСА антенная система состоит из двух, разнесенных по пространству, антенн, формируя два пространственных канала (две синтезированных апертуры).
Пространственная обработка обычно осуществляется в два этапа. На первом этапе формируют необходимые ДН и фазовые центры непосредственно на полотне антенны с помощью мостов, циркуляторов, фазовращателей и т.п. На втором этапе сигналы полученных антенных каналов усиливаются, преобразуются и обрабатываются на промежуточной частоте либо в цифровом виде. Алгоритмы обработки определяются решаемой тактической задачей (СДЦ, измерение координат, компенсация помеховых сигналов и др.). В сложных разведывательно-ударных системах формируется до 15 отдельных пространственных каналов.
Внутрипериодная обработка. В РСА используются когерентно- импульсные периодические сигналы. В каждом периоде повторения импульсов отраженный сигнал несет информацию о цели. Задержка огибающей сигнала определяется дальностью до цели. Изменение фазы сигнала цели относительно опорного колебания определяется изменением расстояния до цели относительно фазового центра антенны и является ис точником информации для синтезирования апертуры. Отношение энер гии сигнала к спектральной плотности шумов определяет вероятность обнаружения цели. Внутрипериодная обработка сигналов обеспечивает получение этой информации обычно путем согласованной обработки сигналов. Иногда внутрипериодную обработку сигналов называют обра боткой в быстром времени, в отличие от медленного времени обра ботки вдоль траектории носителя РСА (синтезирования апертуры).
Межпериодная (траекторная) обработка. Основное назначе ние траекторией обработки - синтезирование апертуры (сжатие сиг налов по азимуту). Поскольку сжатие сигналов по дальности было выполнено в процессе внутрипериодной обработки, результатом траек торией обработки является получение детального изображения функции отражения целей (радиовидение).
Следует отметить, что в общем случае пространственная (по апертуре реальной антенны) и временная (внутрипериодная и межпериодная) обработки являются единым процессом и требуют выполнения единого пространственно-временного алгоритма.
В РСА землеобзора специфическим и наиболее сложным видом обработки является согласованная обработка траекторного сигнача. Тра-екторный сигнал представляет собой последовательность из отраженных от объектов сигналов, полученных в N периодах повторения зондирующего сигнала на траектории перемещения фазового центра антенны. Каждая точечная цель переизлучает сферическую волну в направлении антенны РСА. В качестве иллюстрации на рис. 5.13 приведен случай с двумя
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
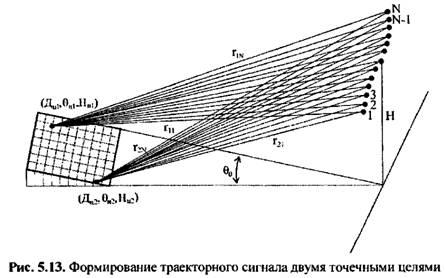
 ) в N точках на траектории. ) в N точках на траектории.
 , которое , которое
 , т.е. влиянием изменения задержки за время длительности импульса на его комплексную огибающую можно пренебречь. В этом случае алгоритм согласованной обработки можно разделить на два независимых этапа: внутрипериод-ную обработку каждого импульса и межпериодную обработку пачки импульсов, т.е. траекторную обработку. Согласованная обработка является линейной операцией, поэтому порядок следования этих этапов может быть произвольным. В некоторых случаях, например при использовании ЛЧМ импульсов и оптической системы обработки, оба этапа могут выполняться одновременно. , т.е. влиянием изменения задержки за время длительности импульса на его комплексную огибающую можно пренебречь. В этом случае алгоритм согласованной обработки можно разделить на два независимых этапа: внутрипериод-ную обработку каждого импульса и межпериодную обработку пачки импульсов, т.е. траекторную обработку. Согласованная обработка является линейной операцией, поэтому порядок следования этих этапов может быть произвольным. В некоторых случаях, например при использовании ЛЧМ импульсов и оптической системы обработки, оба этапа могут выполняться одновременно.
Основными задачами внутрипериодной обработки являются фильтрация принимаемого сигнала от шумов и получение заданного разрешения по дальности (при этом может использоваться сжатие радиосигналов с внутриимпульсной модуляцией). Так как внутрипериодная обработка является хорошо известной операцией, то в дальнейшем будем рассматривать только обработку траекторного сигнала, представляющего собой выходной сигнал внутрипериодной системы обработки. Целью этой обработки является, прежде всего, получение радиолокационного изображения с заданным разрешением по азимуту.
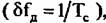
Закономерности формирования траекторного сигнала от одиночного точечного объекта. Для определения алгоритма согласованной обработки сигналов при получении РЛИ рассмотрим закономерности формирования траекторного сигнала от одиночного точечного объекта.
Полагаем, что частота повторения зондирующего сигнала достаточна для представления траекторного сигнала в виде непрерывной функции в пределах интервала синтезирования. В этом случае сигнал
 , принимаемый от i -го объекта, при условии, что фазовые искажения, обусловленные неоднородностями среды распространения и нестабильностями приемопередающего тракта отсутствуют, можно представить в виде: , принимаемый от i -го объекта, при условии, что фазовые искажения, обусловленные неоднородностями среды распространения и нестабильностями приемопередающего тракта отсутствуют, можно представить в виде:

 - текущее расстояние от ФЦА до объекта. - текущее расстояние от ФЦА до объекта.
 до объекта и синтезированную апертуру. до объекта и синтезированную апертуру.
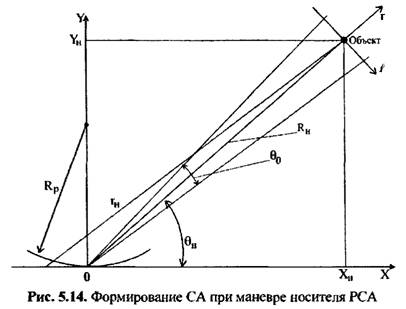
 в зоне обзора перпендикулярна оси дальности г (рис. 5.14). В этом случае синтезированная апертура есть проекция траектории на плоскость (X, V). в зоне обзора перпендикулярна оси дальности г (рис. 5.14). В этом случае синтезированная апертура есть проекция траектории на плоскость (X, V).
 . При этом малые отклонения от заданной траектории того или иного типа будем рассматривать как траекторные нестабильности. При прямолинейной траектории и постоянной скорости носителя V текущее расстояние отсчитывается от точечного объекта до координаты ФЦА на оси X: . При этом малые отклонения от заданной траектории того или иного типа будем рассматривать как траекторные нестабильности. При прямолинейной траектории и постоянной скорости носителя V текущее расстояние отсчитывается от точечного объекта до координаты ФЦА на оси X:

 — соответственно координаты объекта и текущие — соответственно координаты объекта и текущие
координаты ФЦА в плоскости ОХ Y .
 - временной интервал синтезирования. - временной интервал синтезирования.
 в виде ряда: в виде ряда:

 - наклонная дальность до объекта в начальный момент времени. - наклонная дальность до объекта в начальный момент времени.
 , то квадратичная аппроксимация оправданна, когда , то квадратичная аппроксимация оправданна, когда

При невыполнении этого неравенства необходимо учитывать более высокие члены разложения или представлять траекторию движения ФЦА относительно объекта в виде нескольких отрезков, на которых допустима квадратичная аппроксимация текущего расстояния. В дальнейшем будем считать, что условие использования квадратичной аппроксимации текущего расстояния между ФЦА и объектом выполняется, т.е.

 - соответственно радиальные - соответственно радиальные
 , ,
а фаза траекторного сигнала изменяется по закону:

 - постоянная начальная фаза. - постоянная начальная фаза.
Доплеровская частота траекторного сигнала


Второй член в (5.18) определяет линейную частотную модуляцию (ЛЧМ) траекторного сигнала. Индекс частотной модуляции изменяется обратно пропорционально наклонной дальности до отражателя и максимален при боковом обзоре.
 , ,
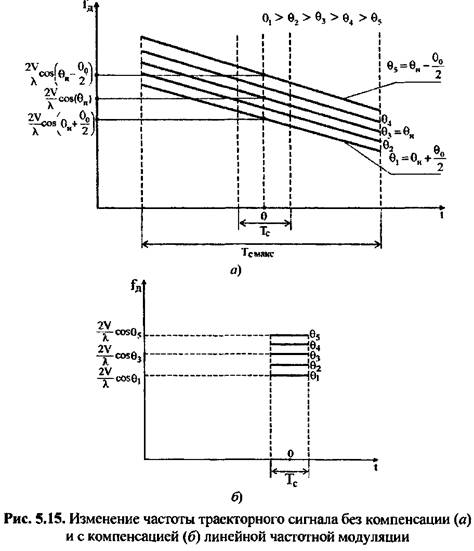
равна
 . Для разрешения сигналов объектов по азимуту необходимо разрешить их по доплеровскои частоте при предварительном устранении ЛЧМ сигналов. В этом случае частота сигналов останется постоянной и будет определяться азимутальным положением объектов (рис. 5.15,6). . Для разрешения сигналов объектов по азимуту необходимо разрешить их по доплеровскои частоте при предварительном устранении ЛЧМ сигналов. В этом случае частота сигналов останется постоянной и будет определяться азимутальным положением объектов (рис. 5.15,6).
 , соизмеримым с дальностью до объекта , соизмеримым с дальностью до объекта
(см. рис. 5.14), расстояние от РЛС до объекта можно представить в виде следующего ряда:
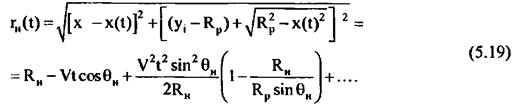
При использовании квадратичной аппроксимации доплеровская частота траекторного сигнала равна

Как видно, отличие траекторного сигнала при маневрировании носителя (полете по окружности) по сравнению с прямолинейной траекторией (5.18) заключается только в изменении крутизны ЛЧМ сигнала.
 в течение времени синтезирования приводит не только в течение времени синтезирования приводит не только
к изменению фазы траекторного сигнала, но и к изменению задержки огибающей импульсов.
 , т.е. , т.е.

можно считать, что задержка огибающей изменяется линейно в пределах синтезированной апертуры:


При несоблюдении условия (5.21) в законе изменения задержки огибающей сигнала необходимо учитывать и квадратичные члены выражения (5.17).
Используя рассмотренные выше закономерности изменения фазы и задержки огибающей, траекторный сигнал точечного объекта при импульсном режиме работы РСА можно записать в виде

 - функция, описывающая отраженный сигнал на выходе внутрипериодной системы обработки. - функция, описывающая отраженный сигнал на выходе внутрипериодной системы обработки.
 . Амплитуда импульсов . Амплитуда импульсов
в пачке плавно изменяется в соответствии с изменением значения ДН и зависит от закона управления ДН (вида обзора). При среднем (метры) разрешении можно считать, что задержка отраженных импульсов меняется от периода к периоду по линейному закону, а фаза - по линейному и квадратичному, что соответствует ЛЧМ траекторного сигнала.
Из проведенного анализа следует, что для согласованной траекторией обработки сигнала система должна обеспечивать когерентное накопление сигнала с ЛЧМ и регулировку параметров системы так, чтобы учесть изменение:
амплитуды сигнала, определяемое ДН антенны и видом обзора земной поверхности;
задержки сигнала, а также зависимость этой задержки от азимута объекта;
средней частоты сигнала объекта при изменении его азимута;
индекса ЛЧМ в зависимости от азимута, дальности объекта и радиуса разворота носителя на траектории полета;
ширины спектра доплеровских частот при изменении азимута объекта.

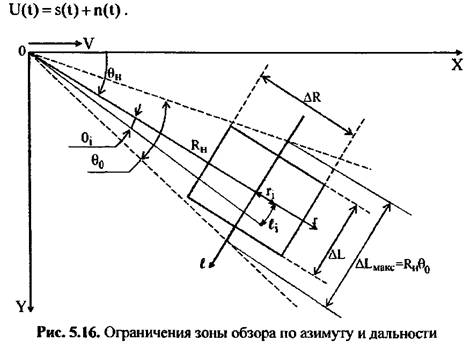
Полезный сигнал s(t) является суперпозицией сигналов элементарных отражателей, расположенных в пределах ДН антенны и данного элемента разрешения по дальности (рис. 5.16):

 — сигнал точечного отражателя, находящегося на дальности — сигнал точечного отражателя, находящегося на дальности
 - угловая координата отражателя относительно направления на центр зоны обзора. - угловая координата отражателя относительно направления на центр зоны обзора.
При квадратичной аппроксимации текущей дальности объекта до ФЦА(5.17)


 , характеризующего РЛИ элемента разрешения), в данном , характеризующего РЛИ элемента разрешения), в данном
случае сводится к реализации алгоритма:

 - опорная функция системы обработки для 1-й цели. - опорная функция системы обработки для 1-й цели.
Обработка сигналов РСА основывается на согласовании опорной функции с траекторным сигналом от одиночной точечной цели, для которой определяется значение РЛИ. Поэтому в качестве опорной функции выбирается функция, комплексно сопряженная с сигналом от одиночной точечной цели:
Сервис онлайн-записи на собственном Telegram-боте
Попробуйте сервис онлайн-записи VisitTime на основе вашего собственного Telegram-бота:
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно.
Зарегистрироваться в сервисе

 - действительная весовая функция синтезированной апертуры, от вида которой зависит, прежде всего, уровень боковых лепестков выходного сигнала. По сравнению с (5.25) фаза имеет противоположный знак. - действительная весовая функция синтезированной апертуры, от вида которой зависит, прежде всего, уровень боковых лепестков выходного сигнала. По сравнению с (5.25) фаза имеет противоположный знак.

 , где п - номер зондирующего импульса, а интегратор представляет собой сумматор импульсов, принимаемых в течение времени синтезирования. , где п - номер зондирующего импульса, а интегратор представляет собой сумматор импульсов, принимаемых в течение времени синтезирования.
 показано на рис. 5.17. показано на рис. 5.17.
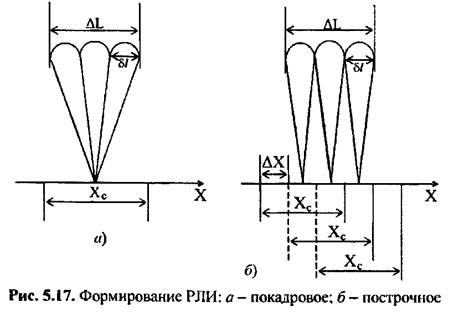

 а максимальный шаг а максимальный шаг

Такой алгоритм получения РЛИ называют построчным (рис. 5.17,6).
 равно равно
 разрешение по азимуту разрешение по азимуту
 - размер синтезированной апертуры по оси X. - размер синтезированной апертуры по оси X.
Следовательно, время синтезирования определяется требуемой разрешающей способностью:

Из (5,18) и (5.30) следует, что полоса доплеровских частот сигнала, обрабатываемых в одном канале, равна

т.е. увеличивается с увеличением путевой скорости и угла наблюдения и с повышением разрешения. Следует отметить, что произведение полосы обрабатываемых частот на время синтезирования не зависит от
 . Отсюда с учетом (5.31) получим предельное время синтезирования в режиме ДОЛ: . Отсюда с учетом (5.31) получим предельное время синтезирования в режиме ДОЛ:

 в (5.29), получим, что величина разрешения в этом случае равна в (5.29), получим, что величина разрешения в этом случае равна

Из анализа траекторного сигнала следует, что для получения РЛИ всех объектов, расположенных в пределах зоны обзора, определяемой реальной ДН, в соответствии с алгоритмом (5.26) система обработки должна учитывать различие параметров сигналов (задержки огибающей и скорости ее изменения, средней доплеровской частоты, крутизны ЛЧМ и ширины спектра в зависимости от координат объектов). Система обработки при этом становится многоканальной. Для упрощения системы обработки целесообразно для всех сигналов в полосе обзора использовать единый алгоритм обработки. В большинстве случаев это возможно только при ограничении полосы обзора как по дальности, так и по азимуту. При этом всю заданную зону обзора можно разбить на ряд полос, в каждой из которых использовать постоянный алгоритм обработки сигналов.
 , соответственно равны: , соответственно равны:

 - начальная задержка огибающей . - начальная задержка огибающей .
 и крутизна и крутизна
ЛЧМ. Фаза траекторного сигнала в этом случае

 ошибка на краях апертуры относительно ее центра ошибка на краях апертуры относительно ее центра
 и и
 одну и ту же опорную функцию, составляет одну и ту же опорную функцию, составляет
 и и
 . При этом . При этом
 ограничено линейным размером ширины ограничено линейным размером ширины
 . Вследствие изменения . Вследствие изменения

Для упрощения системы обработки целесообразно для сигналов всех объектов, независимо от их азимута, использовать при обработке единый закон изменения задержки огибающей. В соответствии с (5.22) это требует изменения начала момента стробирования в соответствии с выражением:

 - задержка ближайшего строба относительно зондирующего им- - задержка ближайшего строба относительно зондирующего им-

 с задержкой сигнала от с задержкой сигнала от
 на краю апертуры на краю апертуры
 не должно превышать величину, соответствующую половине элемента разрешения по дальности, то не должно превышать величину, соответствующую половине элемента разрешения по дальности, то

Тогда допустимая ширина зоны обработки сигналов по азимуту при слежении стробами по единому закону составляет

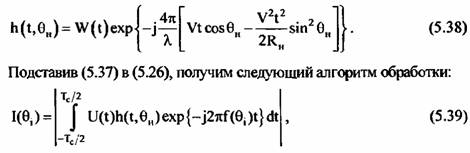
Для объектов, смещенных по азимуту, изменяется также фазовая структура отраженных сигналов (средняя доплеровская частота и крутизна ЛЧМ). Частоту траекторного сигнала можно записать в виде:
В этом выражении первый член характеризует смещение средней доплеровской частоты сигнала любого объекта на величину средней доплеровской частоты сигнала объекта, расположенного в центре зоны обзора. Эта частота устраняется путем гетеродинирования сигнала. Второй член показывает отклонение средней доплеровской частоты при смещении объекта по азимуту. Он пропорционален азимуту объекта, и именно за счет этого члена осуществляется разрешение объектов по азимуту (частоте). Третий член показывает ЛЧМ сигнала объекта в центре зоны обзора, а последний член - изменение частотной модуляции при смещении объекта по азимуту.
Величина фазовой ошибки, возникающей на краю апертуры вследствие рассогласования алгоритма, составляет

 , то ширина зоны обработки по азимуту , то ширина зоны обработки по азимуту


 определяется либо (5.35), либо (5.36). определяется либо (5.35), либо (5.36).
Таким образом, при получении кадра РЛИ для обработки всех сигналов, отраженных от объектов в полосе обзора, в общем случае требуется многоканальная система обработки. При этом каналы должны отличаться по начальной задержке огибающей сигнала (дальности), скорости изменения задержки, средней частоте сигнала (азимуту) и по крутизне его частотной модуляции.
 , определяемой выражениями (5.34), (5.35) и (5.36), опорную функцию (5.28) для всех сигналов можно представить в виде , определяемой выражениями (5.34), (5.35) и (5.36), опорную функцию (5.28) для всех сигналов можно представить в виде

 - опорная функция, которая осуществляет компенсацию - опорная функция, которая осуществляет компенсацию
средней доплеровской частоты сигнала и фокусировку изображения объекта, расположенного в центре зоны обзора:
 относительно доплеровской частоты сигнала относительно доплеровской частоты сигнала



Если ширина ДН меньше, чем возможный размер зоны обзора, т.е.
 — размер антенны. — размер антенны.
 которое в свою очередь зависит от заданного разрешения РСА по азимуту (5.30). которое в свою очередь зависит от заданного разрешения РСА по азимуту (5.30).
В зависимости от решаемой тактической задачи, требуемой величины зоны обзора и времени обзора в РСА используют: 1) обзор полосы местности (переднебоковой обзор); 2) обзор сектора (секторный обзор); 3) обзор участка местности в пределах ширины ДН антенны (телескопический обзор). Другие возможные виды обзора являются либо частными случаями одного из трех указанных (например, боковой обзор), либо их комбинацией.
 к линии к линии
 в течение всего времени формирования РЛИ в течение всего времени формирования РЛИ
заданной зоны обзора. Угол наклона антенны также постоянен в течение всего времени обзора и определяется высотой полета ЛА и дальностью до центра зоны обзора. РЛИ местности формируется либо построчно по мере пролета картографируемой местности, либо в виде отдельных кадров, которые стыкуются между собой.
При построчном картографировании система обработки на каждом интервале синтезирования обеспечивает формирование только одной строки изображения по азимуту в направлении максимума реальной ДН. Для этого в каждом канале дальности принимаемый сигнал умножается на опорную функцию

 , т.е. формируется только , т.е. формируется только
 и для каждого из них формируют опорную функцию и для каждого из них формируют опорную функцию
вида (5.41).
 (5.40). (5.40).
 . Максимальное . Максимальное
 - размер - размер
антенны.
 и размером сектора обзора: и размером сектора обзора:
 произведение полосы обрабатываемых частот на время синтезирования постоянно: произведение полосы обрабатываемых частот на время синтезирования постоянно:

 . Для этого необходимо изменять частоту повторения с изменением . Для этого необходимо изменять частоту повторения с изменением
угла наблюдения:

 . Максимальное время синтезирования в этом случае составляет: . Максимальное время синтезирования в этом случае составляет:

 - количество некогерентных накоплений при формировании РЛИ. - количество некогерентных накоплений при формировании РЛИ.
Таким образом, при СО время синтезирования ограничено шириной зоны обзора и временем обзора и обычно бывает невелико. В связи с этим при СО достаточно часто осуществляется нефокусированная обработка (режим ДОЛ), при этом опорная функция компенсирует среднюю частоту сигналов кадра и не учитывает ЛЧМ сигнал. Средняя частота рассчитывается для каждого интервала синтезирования:

 - угол наблюдения на к-м интервале синтезирования. - угол наблюдения на к-м интервале синтезирования.
Предельное время синтезирования в режиме ДОЛ определяется выражением (5.32), а разрешающая способность РСА - выражением (5.33).
3. Телескопический обзор (ТО) применяется при необходимости получения высокого разрешения и многократного наблюдения одного и того же участка местности. При этом участок местности, представляющий интерес, должен полностью помещаться внутри ДН и его РЛИ получается путем кадровой обработки сигнала на одном интервале синтезирования.
 относительно центра интервала синтезирования. ДН относительно центра интервала синтезирования. ДН
отслеживает центр кадра в течение одного или нескольких интервалов синтезирования. При этом закон управления ДН по азимуту имеет вид:
 - начальные угол наблюдения и наклонная дальность до - начальные угол наблюдения и наклонная дальность до
центра кадра на интервале синтезирования.
При ТО в отличие от ПБО и СО отсутствует модуляция сигнала, связанная с изменением положения ДН. Опорная функция при ТО изменяется от одного интервала синтезирования к другому по мере изменения угла наблюдения и дальности центра кадра:

 для каждого элемента для каждого элемента
разрешения в кадре РЛИ необходимо применять оптимальный алгоритм (5.26), что ведет к усложнению системы обработки.
 ограничено только вычислительными ограничено только вычислительными
возможностями системы обработки и фазовыми искажениями траекторного сигнала.

Алгоритм обработки сигналов РСА землеобзора наряду с синтезированием предусматривает некогерентное накопление сигналов РЛИ.
Некогерентное накопление. РЛИ, полученному с помощью РСА, как и всякому изображению, полученному с помощью когерентной системы, присущи особенности, связанные со спекл-шумом. Спеклшум проявляется в яркостной пятнистости (зернистости) при изображении даже статистически ровных поверхностей.
РЛИ в РСА при однократном обзоре представляет собой пространственный шум, дисперсия которого изменяется в соответствии с отражающими свойствами объектов, а интервал корреляции примерно равен разрешающей способности.
Спекл-шум возникает из-за того, что случайные по характеристикам и расположению элементарные отражатели, представляющие шероховатую поверхность объектов в элементе разрешения РСА, образуют случайное поле переизлучения. Следствием этого является случайная величина ЭПР элементов разрешения объектов. Пятнистость изображения может заметно снизить вероятность обнаружения объектов и другие характеристики РСА.
Влияние спекл-шума ослабляется путем дополнительного некогерентного накопления (сложения) нескольких независимых РЛИ одного и того же участка местности (объектов). Для формирования некоррелированных между собой изображений могут использоваться различные методы:
параллельная работа РЛС на нескольких разнесенных несущих частотах;
работа с излучением и приемом сигналов различной поляризации;
разбиение всей полосы частот зондирующего сигнала на ряд примыкающих к друг другу полос, ширина которых определяется требуемым разрешением по дальности;
 которых определяется требуемым разрешением по азимуту. которых определяется требуемым разрешением по азимуту.
 , ,
 , поэтому максимально возможное число некогерентных выборок , поэтому максимально возможное число некогерентных выборок
изображения на всем интервале наблюдения объекта равно
 определяется отношением ширины зоны обзора АЬ и определяется отношением ширины зоны обзора АЬ и
 . Если зона обзора определяется . Если зона обзора определяется
шириной ДН, то:

Рассмотрим алгоритм некогерентного накопления РЛИ при переднебоковом обзоре. Максимальный размер синтезированной апертуры
 , а размер апертуры при синтезировании , а размер апертуры при синтезировании
 . При этом максимальное число некогерентных . При этом максимальное число некогерентных
изображений одного и того же объекта, которое может быть сформировано при ПБО и использовании всего траекторного сигнала:

 . Разнос необходим для обеспечения некоррелированности . Разнос необходим для обеспечения некоррелированности
 , и складываются (рис. 5.18,а). В , и складываются (рис. 5.18,а). В
 некогерентных накоплений. некогерентных накоплений.
При формировании РЛИ по кадрам при ПБО изображения кадров смещены на размер синтезированной апертуры, поэтому для получения
 азимутальных лучей. Однако каждый объект в этом случае наблюдается только один раз, поэтому для некогерентного накопления необходимо, чтобы кадры РЛИ перекрывались, т.е. в кадре необходимо формировать азимутальных лучей. Однако каждый объект в этом случае наблюдается только один раз, поэтому для некогерентного накопления необходимо, чтобы кадры РЛИ перекрывались, т.е. в кадре необходимо формировать

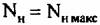
из (5.31) получим такое же число лучей, как и при ТО. Это объясняется тем, что для максимального некогерентного накопления при ПБО количество азимутальных каналов в кадре должно обеспечивать перекрытие всей зоны облучения, определяемой шириной ДН реальной антенны.

|

