РадиоведениеЦифровые системы обработки
Если основным требованием к РСА землеобзора является получение

изображения заданной зоны обзора на борту носителя в реальном масштабе времени, то используют цифровую систему обработки (ЦСО), которая обеспечивает минимальную задержку информации (рис. 6.10).
 Время задержки уменьшается с ростом скорости носителя РСА. Время задержки уменьшается с ростом скорости носителя РСА.

 меньше ширины ДН меньше ширины ДН
антенны на заданной дальности, можно использовать многоканальную обработку по азимуту, и время задержки будет определяться только временем синтезирования.
Третьей причиной задержки получения изображения является конечное время выполнения операций в системе обработки, которое в сильной степени зависит от вида системы обработки. Уменьшить это время можно путем использования ЦСО.
Анализ РЛИ (обнаружение и распознавание цели) обычно занимает значительное время, поэтому сформированный кадр изображения на экране индикатора замораживают на время принятия решения оператором.
Более жесткие требования к задержке получения информации о цели предъявляются системами целеуказания и наведения с использованием РСА. При этом должны оперативно решаться задачи коррекции РЛИ при маневре носителя РСА (геометрические и амплитудные искажения, привязка к земной системе координат) и сопровождения цели по всем координатам.
Далее рассматриваются структурные схемы и алгоритмы цифровой обработки траекторных сигналов для формирования РЛИ в РСА землеобзора.
В цифровой системе обработки (см. рис. 6.10) видеосигналы с выхода фазового детектора (ФД) в каждом периоде повторения подвергаются дискретизации по времени и квантованию по амплитуде и преобразуются с помощью быстродействующего АЦП в цифровые сигналы. Устройство предварительной обработки (ПО) осуществляет компенсацию эффекта движения носителя РСА по сигналам навигационной системы (НС ) и форматирует цифровые сигналы для регистрации в запоминающем устройстве (ЗУ). Данные, полученные от всех разрешаемых по дальности элементов в зоне обзора, запоминаются на участке траектории, равном синтезированной апертуре, на время выполнения алгоритма обработки. Цифровой процессор (ЦП) осуществляет обработку цифровых сигналов, хранящихся в ЗУ, и поступающих из вычислителя опорной функции. Алгоритм процессора определяется способом обработки траекторного сигнала при синтезировании апертуры. Далее считается, что сжатие сигнала по дальности выполнено отдельным алгоритмом и здесь не рассматривается. Вычислитель опорной функции снабжает процессор требуемыми опорными сигналами для данного алгоритма обработки (режима работы) с учетом данных, поступающих из навигационной системы. В результате на выходе процессора формируется массив цифровых сигналов, соответствующих амплитуде (или мощности) сигналов, отраженных от каждого разрешаемого элемента в зоне обзора РСА, т.е. цифровое изображение местности и объектов, которое передается в систему отображения.
Главными характеристиками ЦСО являются разрядность и быстродействие АЦП и процессора, а также объем памяти ЗУ, при этом требования к ЦСО, а также к вычислителю опорной функции зависят не только от параметров РСА, но и от способа выполнения алгоритма обработки процессором.
При использовании цифровой обработки сигналов и цифрового управления режимами работы к достоинствам РСА кроме быстродействия, т.е. возможности получения РЛИ просматриваемого участка местности на борту ЛА в реальном или близком к реальному масштабу времени, добавляются также широкие возможности по оперативному изменению разрешающей способности, вида обзора, дальности и угла наблюдения. Кроме того, при цифровой обработке проще решаются задачи компенсации искажений сигналов, селекции движущихся целей и появляется возможность синтезирования апертуры антенны при маневрировании ЛА.
В заключение отметим, что выбор той или иной системы обработки определяется задачами, которые возлагаются на РСА, а также возможностями элементной базы, которая может быть использована при ее создании.
В цифровой системе обработки квадратурные составляющие сигнала с выходов ФД в каждом периоде повторения преобразуются в цифровые сигналы с помощью АЦП и записываются в запоминающее устройство (ЗУ). Требование к АЦП по быстродействию (частоте дискретизации РАЦП) определяется шириной спектра зондирующего сигнала,
 , ,
 = 50 МГц. = 50 МГц.
 , т.е. добавление одного разряда расширяет динамический диапазон цифрового сигнала на 6 дБ. Обычно АЦП с 4...8 разрядами считается оптимальным с точки зрения обеспечения заданного динамического диапазона при минимальных шумах квантования. , т.е. добавление одного разряда расширяет динамический диапазон цифрового сигнала на 6 дБ. Обычно АЦП с 4...8 разрядами считается оптимальным с точки зрения обеспечения заданного динамического диапазона при минимальных шумах квантования.
 и, и,
 , получим: , получим:

Важной особенностью этапа записи траекторного сигнала является необходимость двухканальной системы для получения квадратурных составляющих. При этом предъявляются высокие требования к идентичности каналов (ФД, АЦП). Возможно также использование однока-нальной системы записи на поднесущей частоте. Так, при использовании поднесущей частоты траекторного сигнала, как и при записи сигнала в оптической системе обработки, требуется только один канал ФД и АЦП. При этом частоту выборок траекторного сигнала (частоту повторения РЛС) необходимо увеличить в два раза. При использовании промежуточной поднесущей частоты зондирующего сигнала требуется дискретизация по задержке (дальности) в два раза чаще и, следовательно, в два раза более быстродействующий АЦП. Частоту повторения РЛС увеличивать при этом не требуется.
Требования к устройствам, входящим в состав системы ЦСО.
В цифровом процессоре реализуются математические операции синтезирования

апертуры:
 - опорная функция системы обработки для 1-й цели. - опорная функция системы обработки для 1-й цели.


Опорная функция для 1-й цели также представляется двумя квадратурными составляющими:
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение

 разбивается на четыре операции умножения и две операции суммирования: разбивается на четыре операции умножения и две операции суммирования:

а алгоритм согласованной обработки траекторного сигнала может быть представлен в виде
Структура алгоритма обработки, формирующего один синтезированный луч в направлении 8;, показана на рис. 6.11.
 - количество отсчетов РЛИ на элемент разрешения по азимуту. Кроме того, необходимо выполнить столько же операций сложения и операций вычисления - количество отсчетов РЛИ на элемент разрешения по азимуту. Кроме того, необходимо выполнить столько же операций сложения и операций вычисления



Требования по быстродействию процессора и объему оперативной памяти могут быть снижены путем введения предварительного фильтра (ПФ), который позволяет уменьшить частоту отсчетов сигнала на входе процессора.
 , которая определяется шириной ДН реальной антенны: , которая определяется шириной ДН реальной антенны:

 - максимальная дальность - максимальная дальность
действия РСА.



 , поэтому , поэтому

 , необходимого для получения заданного разрешения по азимуту. , необходимого для получения заданного разрешения по азимуту.

 лучей, разнесенных по азимуту лучей, разнесенных по азимуту
 . Это объясняется тем, что в данном случае синтезированные лучи должны перекрывать зону одновременного обзора, определяемую шириной ДН реальной антенны. . Это объясняется тем, что в данном случае синтезированные лучи должны перекрывать зону одновременного обзора, определяемую шириной ДН реальной антенны.
 (рис. 6.12,а), на выходе такого (рис. 6.12,а), на выходе такого
 ,. Эта частота ,. Эта частота
 , что позволяет снизить требования к объему памяти и , что позволяет снизить требования к объему памяти и
быстродействию ЦП.
Допустимая частота выборок преобразованного траекторного сигнала на выходе ПФ будет определяться выражением

 - коэффициент запаса по частоте выборок, который определяется - коэффициент запаса по частоте выборок, который определяется
допустимым уровнем перекрытия боковых лепестков спектра сигнала на выходе ПФ (см. рис. 6.12,а).

 обычно изменяется в пределах 1...2 при уровнях перекрытия -50... -30 дБ. обычно изменяется в пределах 1...2 при уровнях перекрытия -50... -30 дБ.
 , ,
 = =
 . Если при этом интервалы времени, на которых происходит накопление сигнала, не перекрываются, ПФ называется одноканапънъш. Такое суммирование позволяет понизить частоту отсчетов траекторного сигнала при сохранении однозначности РЛИ по азимуту, . Если при этом интервалы времени, на которых происходит накопление сигнала, не перекрываются, ПФ называется одноканапънъш. Такое суммирование позволяет понизить частоту отсчетов траекторного сигнала при сохранении однозначности РЛИ по азимуту,
 можно найти из соотношения можно найти из соотношения

 соответствует предельному времени синтезирования при нефокусированной обработке сигнала - режиму ДОЛ. соответствует предельному времени синтезирования при нефокусированной обработке сигнала - режиму ДОЛ.

 , то возможно использование ПФ для устранения этой , то возможно использование ПФ для устранения этой

 . В ПФ реализуется операция . В ПФ реализуется операция

 - цифровой сигнал на выходе ПФ. - цифровой сигнал на выходе ПФ.
Надо иметь в виду, что накопление сигнала должно производиться одновременно в синфазном и квадратурном каналах.
Часто оказывается возможным снизить требования к быстродействию системы предварительной обработки сигналов. Обычно ширина зоны обзора по дальности оказывается значительно меньше максимально возможной по условию однозначности дальности. Это означает, что период повторения гораздо больше времени приема сигналов, отраженных от заданной зоны обзора. В этом случае запись сигналов в систему памяти в каждом периоде повторения может производиться в течение этой малой части периода, а считывание возможно в течение всего периода. При этом частота считывания снижается во столько раз, во сколько период зондирования больше времени приема сигналов, отраженных от заданной зоны обзора. Реализация этого алгоритма требует введения дополнительного быстродействующего буферного запоминающего устройства между АЦП и ПФ.



 . Требуемое быстродействие . Требуемое быстродействие
 в этом случае является координатой РЛИ по азимуту. в этом случае является координатой РЛИ по азимуту.
Способ прямой свертки может быть использован при любом виде обзора и обеспечивает высокое качество РЛИ, однако требует значительных затрат на формирование РЛИ каждого элемента разрешения отдельно. Поэтому он применяется в основном при ПБО с построчным формированием РЛИ.
 каждого элемента разрешения. каждого элемента разрешения.

 и алгоритм обработки сводится к суммированию с учетом весовой функции синусной и косинусной составляющих траекторного сигнала: и алгоритм обработки сводится к суммированию с учетом весовой функции синусной и косинусной составляющих траекторного сигнала:

При поступлении с выхода ПФ нового отсчета сигналов полоски дальности первый отсчет в ЗУ стирается, а все остальные сдвигаются в сторону первого. Поступивший отсчет записывается в освободившуюся ячейку и вычисляется новый отсчет РЛИ. Таким образом по мере полета ЛА формируется РЛИ полосы местности.
 комплексных умножений. Для комплексных умножений. Для
 . Поэтому требуемое быстродействие . Поэтому требуемое быстродействие





Если некогерентное накопление при строчном алгоритме отсутствует (формируется один луч в направлении, совпадающем с максимумом реальной ДН), то

Как видно из приведенной формулы, при обработке сигнала способом прямой свертки и строчном алгоритме с одним синтезированным лучом (без некогерентного накопления) требуемое быстродействие растет пропорционально третьей степени разрешающей способности РСА по азимуту.

 требуемое быстродействие составляет 20,8 млн операций/с . требуемое быстродействие составляет 20,8 млн операций/с .
 . В частности, при боковом обзоре . В частности, при боковом обзоре
 при строчном алгоритме позволяет обеспечить необходимый шаг по РЛИ. при строчном алгоритме позволяет обеспечить необходимый шаг по РЛИ.
 во временной области соответствует преобразование Фурье от произведения спектров этих функций: во временной области соответствует преобразование Фурье от произведения спектров этих функций:

 - символ преобразования Фурье. Как видно из приведенного - символ преобразования Фурье. Как видно из приведенного
 и и
 в пределах интервала синтезирования. Полученные в результате этих преобразований спектры перемножаются, после чего результирующий спектр подвергается обратному преобразованию Фурье. Модуль обратного преобразования Фурье является сигналом, определяющим РЛИ (рис. 6.14,6). в пределах интервала синтезирования. Полученные в результате этих преобразований спектры перемножаются, после чего результирующий спектр подвергается обратному преобразованию Фурье. Модуль обратного преобразования Фурье является сигналом, определяющим РЛИ (рис. 6.14,6).
Все перечисленные преобразования представляют собой дискретные преобразования Фурье (ДПФ), которые обычно реализуются на основе алгоритмов быстрого преобразования Фурье (БПФ). Поэтому свертку в частотной области называют высокоскоростной или быстрой. Однако эффективность быстрой свертки достаточно высока лишь в том случае, если преобразование (6.8) сводится к преобразованию типа свертки. Поэтому этот способ целесообразно использовать при ПБО и равномерном прямолинейном движении носителя.
Для реализации выражения (6.8) в частотной области при цифровой обработке сигналов должна быть реализована так называемая линейная свертка. При этом, строго говоря, число отсчетов как сигнала, так и опорной функции должно быть бесконечным. Реально же обрабатывается конечное число отсчетов. Произведение ДПФ двух функций с конечным числом отсчетов соответствует так называемой кольцевой свертке.
 , т.е. является правильным, а все остальные - , т.е. является правильным, а все остальные -
 правильных отсчетов, число отсчетов входного сигнала правильных отсчетов, число отсчетов входного сигнала
 . При этом число отсчетов опорной функции нужно увеличить до той же величины путем добавления нулевых по значению отсчетов. . При этом число отсчетов опорной функции нужно увеличить до той же величины путем добавления нулевых по значению отсчетов.
 отсчетов, а на отсчетов, а на
 отсчетов сигнала по- отсчетов сигнала по-

 новых отсчетов сигнала вытесняют из ЗУ столько же устаревших, и цикл обработки повторяется. Таким образом, при быстрой свертке РЛИ формируется по кадрам. новых отсчетов сигнала вытесняют из ЗУ столько же устаревших, и цикл обработки повторяется. Таким образом, при быстрой свертке РЛИ формируется по кадрам.
 , где п - число итераций при выполнении БПФ. Поэтому требующееся число операций при быстрой свертке составляет , где п - число итераций при выполнении БПФ. Поэтому требующееся число операций при быстрой свертке составляет

 , поэтому требуемое быстродействие , поэтому требуемое быстродействие

 представляет представляет
 . Если кадр РЛИ должен перекрывать всю зону обзора, определяемую шириной реальной ДН, то число правильных отсчетов равно максимальному числу лучей внутри ДН: . Если кадр РЛИ должен перекрывать всю зону обзора, определяемую шириной реальной ДН, то число правильных отсчетов равно максимальному числу лучей внутри ДН:
Сервис онлайн-записи на собственном Telegram-боте
Попробуйте сервис онлайн-записи VisitTime на основе вашего собственного Telegram-бота:
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно.
Зарегистрироваться в сервисе
 . Поэтому сдвиг . Поэтому сдвиг

 , а требуемое быстродействие , а требуемое быстродействие
 ГА опорная функция рассчитывается для центра зоны обзора: ГА опорная функция рассчитывается для центра зоны обзора:
Она осуществляет компенсацию средней доплеровской частоты зоны обзора и фокусировку изображения (компенсацию ЛЧМ). В результате траекторный сигнал каждой точки зоны обзора имеет постоянную доплеровскую частоту. Сигнал РЛИ в каждом канале дальности формируется путем преобразования Фурье от произведения принятого сигнала и опорной функции


 строками. Далее хранимые в ЗУ отсчеты траекторного сигнала строками. Далее хранимые в ЗУ отсчеты траекторного сигнала
полностью обновляются. В результате обработки сигнала на другом интервале синтезирования образуется новый парциальный кадр и т.д.
 равно разрешающей способности РСА. равно разрешающей способности РСА.
Полоса частот, обрабатываемых процессором БПФ, определяется частотой повторения входного сигнала, поэтому при отсутствии ПФ и частоте повторения зондирующих импульсов большей, чем ширина спектра доплеровских частот принимаемого сигнала на выходе процессора БПФ, имеются избыточные отсчеты РЛИ вне ширины ДН реальной антенны. Применение ПФ устраняет избыточные отсчеты и снижает требование к быстродействию процессора.
 . Для этого достаточно дополнить число отсчетов . Для этого достаточно дополнить число отсчетов

Добавление нулевых отсчетов не связано с расширением памяти, однако повышает требования к быстродействию процессора. Следует отметить, что в любом случае число отсчетов сигнала на входе процессора БПФ
 , поэтому добавление нулевых отсчетов применяют также для выполнения этого условия. , поэтому добавление нулевых отсчетов применяют также для выполнения этого условия.


 , а поскольку при ГА число , а поскольку при ГА число


В связи с тем, что при ГА используется одна опорная функция для всей зоны обзора по азимуту, качество РЛИ по сравнению со способом прямой свертки снижается. Это объясняется тем, что точно сфокусированным оказывается только центр кадра по азимуту (выбор размеров кадра при обработке с одной опорной функцией обсуждался в гл. 5). Кроме того, все азимутальные каналы имеют одинаковую весовую обработку W(t), и подстройка алгоритма для каждого частотного канала в
процессе БПФ невозможна . Вместе с тем, поскольку при ГА снижаются требования к многоканальности системы обработки (одна опорная функция) и используется БПФ, обработка сигнала производится с высокой скоростью, что особенно важно для получения РЛИ в реальном масштабе времени.
 при использовании ПФ при использовании ПФ
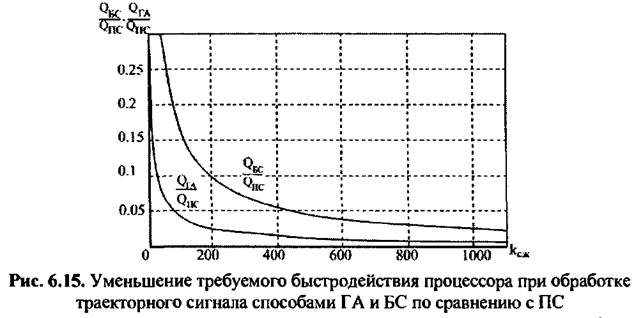
 , и выражения для требуемого быстродействия при различных алгоритмах обработки приобретают вид: , и выражения для требуемого быстродействия при различных алгоритмах обработки приобретают вид:

 подразумевается число лучей, перекрывающих всю диаграмму направленности реальной антенны. подразумевается число лучей, перекрывающих всю диаграмму направленности реальной антенны.
 - ширина синтезированной ДН. Зависимости отношений - ширина синтезированной ДН. Зависимости отношений

 ) способ ГА имеет преимущества по быстродействию перед остальными способами, особенно перед способом ПС. ) способ ГА имеет преимущества по быстродействию перед остальными способами, особенно перед способом ПС.
Способы цифровой обработки сигналов в РСА (прямой свертки, быстрой свертки и гармонического анализа), рассмотренные выше применительно к случаю синтезирования апертуры при прямолинейном и равномерном полете ЛА, можно обобщить и на случай произвольного движения ЛА. Необходимым условием для этого является определение опорной функции для каждого интервала синтезирования.
 , соизмеримым с дальностью наблюдения, допустимая величина зоны , соизмеримым с дальностью наблюдения, допустимая величина зоны
 ). ).
|

