РадиоведениеДальность обнаружения целей РСА землеобзора
В качестве характеристики обнаружения целей РСА используют дальность обнаружения, т.е. максимальное расстояние между РЛС и целью, при котором цель обнаруживается с заданными характеристиками эффективности: вероятностью правильного обнаружения и вероятностью ложной тревоги.
 и условия функционирования РСА (помехи, фон, дождь и т.п.) и условия функционирования РСА (помехи, фон, дождь и т.п.)
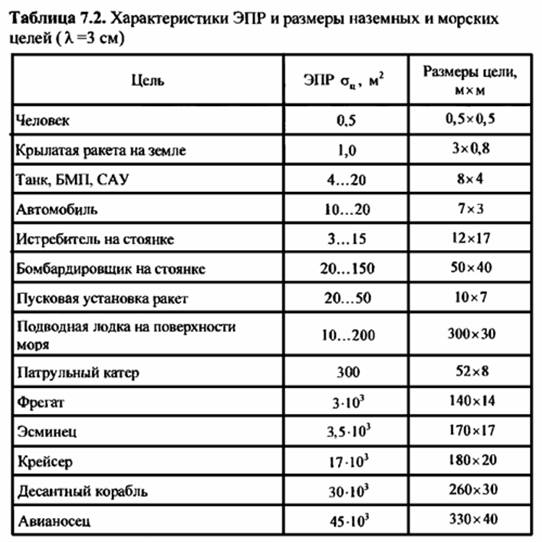
В качестве целей задают типовые объекты, характерные для задач, решаемых рассматриваемым авиационным или космическим комплексом (табл. 7.2)
 : :
 рукотворных целей (танки, БМП, рукотворных целей (танки, БМП,
самолеты, ракетные комплексы, корабли) в сантиметровом диапазоне волн справедлива эмпирическая формула

Для целей с гладкой поверхностью (крылатые ракеты, истребители) используется меньшее значение коэффициента, а для сложных по конфигурации целей - большее значение.
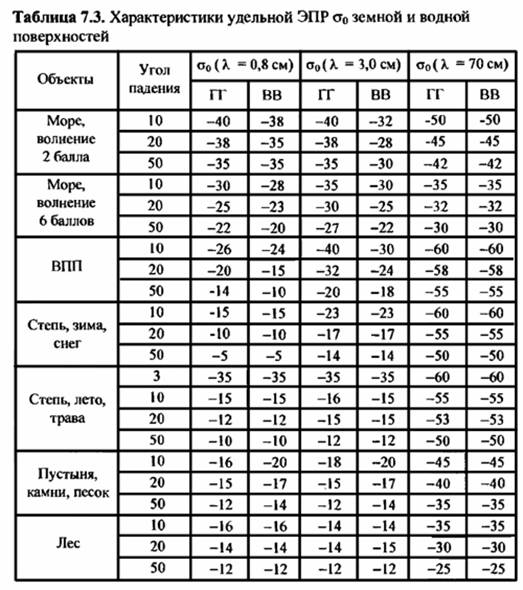
В табл. 7.3 в качестве объектов при картографировании представлены характеристики удельных ЭПР земной и водной поверхности.

(вероятность пропуска цели 0,2).

В конкретных условиях функционирования РСА всегда существуют неконтролируемые изменения характеристик цели (ЭПР цели и фона), среды распространения (осадки, поглощение в растительности) и потерь в тракте РЛС. Эти изменения могут достигать 5...7 дБ. Поэтому в дальнейшем при расчетах используют формулы без уточняющих коэффициентов. Их отличие от более точных формул гораздо меньше неконтролируемых изменений характеристик целей, условий функционирования и параметров РЛС.
В зависимости от решаемой тактической задачи используются различные характеристики обнаружения. Обычно рассматривают четыре типовые задачи: 1) картографирование; 2) обнаружение точечной цели на слабоотражающем фоне; 3) обнаружение точечной цели на сильноотражающем фоне; 4) обнаружение цели с отрицательным контрастом, т.е. когда ЭПР цели меньше ЭПР элемента фона. Эффективность решения ряда других задач, например обнаружения многоточечной цели, может быть определена через характеристики обнаружения для перечисленных четырех случаев. Специальные задачи - селекция движущихся целей и скоростной портрет - будут рассмотрены в других разделах.
При картографировании наиболее сложной задачей является обнаружение элементов земной (водной) поверхности на фоне различного рода шумов, прежде всего внутреннего шума РСА, отражений от метеообразований (дождя), а также пассивных и активных помех. В этом случае используется такая характеристика, как дальность картографирования, т.е. максимальная дальность, на которой обеспечивается обнаружение элементов пространственно-распределенной цели с заданными вероятностями правильного обнаружения и ложной тревоги. Обычно задается тип цели с минимальной удельной ЭПР (ВПП, водная поверхность и т.п.) и условия картографирования (тип обзора, метеоусловия, помеховая обстановка).
Обнаружение отдельной сосредоточенной (точечной) цели на слабоотражающем фоне также характеризуют дальностью обнаружения. При этом задают конкретную цель, например малый корабль (его ЭПР) и фон, на котором она обнаруживается. Также задают тип обзора, метеоусловия и помеховую обстановку. Полагают, что дальность обнаружения в этом случае определяется уровнем шумов и помех, а влиянием фона (отражениями от подстилающей земной или водной поверхности) на обнаружение можно пренебречь,
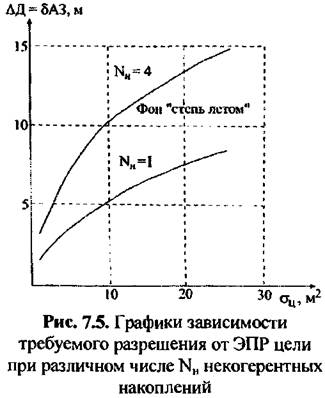
При обнаружении малоразмерной (точечной) цели на сильноотражающем фоне основное влияние на характеристики обнаружения оказывает помеховый сигнал фона в элементе разрешения, а внутренним шумом РСА можно пренебречь. В этом случае характеристикой обнаружения является вероятность обнаружения конкретной цели на задан ном фоне, например танка на фоне "степь летом" при заданной вероятности ложной тревоги в элементе разрешения. Основным фактором, определяющим эффективность обнаружения малоразмерной цели на фоне отражений от земной поверхности, является разрешающая способность РСА, так как чем меньше площадь элемента разрешения, тем меньше помеховый сигнал фона в этом элементе и тем выше вероятность обнаружения цели. При этом под целью мы понимаем такой объект, размеры которого меньше размеров элемента разрешения РСА, т.е. объект полностью размещается внутри одного элемента разрешения.
4. В случае обнаружения цели на сильноотражающем фоне возможна ситуация, когда ЭПР цели меньше ЭПР фона (отрицательный контраст), например при обнаружении просеки (дороги) в лесу. Здесь также задается вероятность обнаружения конкретной цели на конкрет ном фоне. Эта вероятность определяется отношением ЭПР фона к ЭПР цели (контрастом), уровнем шумов, помех и боковых лепестков ФН РСА, которые уменьшают контраст.
При обнаружении цели на слабоотражающем фоне дальность обнаружения определяется отношением сигнал/шум в элементе разрешения.
 , то плотность потока мощности в районе цели будет равна , то плотность потока мощности в районе цели будет равна
 , в направлении приемной антенны: , в направлении приемной антенны:
 и плотность потока мощности у приемной антенны и плотность потока мощности у приемной антенны
а мощность принимаемого сигнала
 - эффективная площадь антенны. - эффективная площадь антенны.
При использовании одной и той же антенны на передачу и прием площадь антенны равна

При этих условиях для одного излучаемого и принимаемого импульса отношение сигнал/шум

 - мощность - мощность
 - потери мощности сигнала цели в высокочастотном тракте и - потери мощности сигнала цели в высокочастотном тракте и
среде распространения.
Отношение сигнал/шум. Мощность шума определяется прежде всего внутренними шумами приемника:

 - полоса приемника, определяемая - полоса приемника, определяемая
 - односторонняя спектральная плотность шума. - односторонняя спектральная плотность шума.
 некоторых входных устройств РЛС представлены в табл. 7.4. некоторых входных устройств РЛС представлены в табл. 7.4.
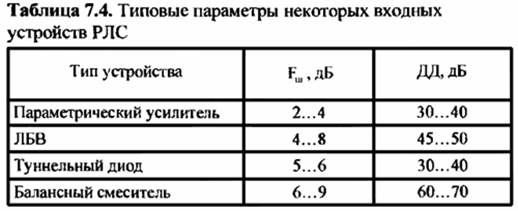
Кроме шумов приемника, существуют внутренние шумы системы обработки (АЦП, процессора, шумы оптической системы обработки), которые будем считать на 3...5 дБ меньшими, чем внутренние шумы приемника. Характеристики обнаружения в присутствии организованных (пассивных и активных) помех оговаривают особо, задавая помеховую обстановку и методы помехозащиты.
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
 в в
 , поэтому последние не учитываются. В дециметровом и метровом диапазонах радиоволн влияние внешних шумов резко возрастает, что обусловлено излучением многочисленных телевизионных, связных, навигационных и других передатчиков. Это серьезно ограничивает дальность обнаружения, и для снижения уровня помех применяют специальные меры пространственного и частотного подавления источников помех. , поэтому последние не учитываются. В дециметровом и метровом диапазонах радиоволн влияние внешних шумов резко возрастает, что обусловлено излучением многочисленных телевизионных, связных, навигационных и других передатчиков. Это серьезно ограничивает дальность обнаружения, и для снижения уровня помех применяют специальные меры пространственного и частотного подавления источников помех.
Потери в высокочастотном тракте (передатчик — антенна - обтекатель антенны - приемник) обычно составляют 4...6 дБ. Потери в среде распространения (двухстороннего: до цели и обратно) в основном определяются потерями в дожде, например поглощение волны длиной 3 см при интенсивности дождя 4 мм/ч равно 0,1 дБ/км. При сплошном дожде на пути распространении волны, равном 30 км, эти потери составляют 3 дБ.
Увеличение отношения сигнал/шум по сравнению с простым одиночным импульсом обусловлено когерентным накоплением при сжатии сигнала по дальности и в результате синтезирования апертуры.
 . Более точные взаимосвязи полосы частот и коэффициента сжатия, обусловленные выбором конкретной весовой функции при обработке импульса, обычно учитывают в виде коэффициентов потерь при сжатии и синтезировании. . Более точные взаимосвязи полосы частот и коэффициента сжатия, обусловленные выбором конкретной весовой функции при обработке импульса, обычно учитывают в виде коэффициентов потерь при сжатии и синтезировании.
 раз увеличивает отношение сигнал/шум. Поскольку время синтезирования определяется требуемым раз увеличивает отношение сигнал/шум. Поскольку время синтезирования определяется требуемым
 то число накапливаемых импульсов можно записать как то число накапливаемых импульсов можно записать как
 в формулу отношения сигнал/шум для одного импульса, получим отношение мощности сигнала к мощности внутреннего шума при синтезировании апертуры: в формулу отношения сигнал/шум для одного импульса, получим отношение мощности сигнала к мощности внутреннего шума при синтезировании апертуры:

 - суммарные потери в высокочастотном тракте при распространении волны и при обработке сигнала. - суммарные потери в высокочастотном тракте при распространении волны и при обработке сигнала.
 кроме потерь в высокочастотном тракте и при распространении электромагнитных волн, учитывают также потери при обработке сигналов. Потери при обработке обусловлены: 1) несогласованностью характеристик системы обработки и сигналов вследствие ошибок определения параметров движения носителя и характеристик РСА, а также ошибок формирования опорной функции процессором; 2) несовпадением частоты сигнала с частотой настройки одного из гребенки фильтров обработки; 3) падением амплитуды сигнала на краях ДН антенны и весовой функции обработки; 4) флуктуациями траекторного сигнала. При обнаружении точечной цели эти потери достигают 5...8 дБ, а суммарные потери соответственно 12... 17 дБ. кроме потерь в высокочастотном тракте и при распространении электромагнитных волн, учитывают также потери при обработке сигналов. Потери при обработке обусловлены: 1) несогласованностью характеристик системы обработки и сигналов вследствие ошибок определения параметров движения носителя и характеристик РСА, а также ошибок формирования опорной функции процессором; 2) несовпадением частоты сигнала с частотой настройки одного из гребенки фильтров обработки; 3) падением амплитуды сигнала на краях ДН антенны и весовой функции обработки; 4) флуктуациями траекторного сигнала. При обнаружении точечной цели эти потери достигают 5...8 дБ, а суммарные потери соответственно 12... 17 дБ.
 определяется требуемой определяется требуемой
вероятностью правильного обнаружения при заданной ложной тревоге которые , в свою очередь, определяются статистическими характеристиками сигнала цели и шумов.
Наземные и морские цели отличаются сложной конфигурацией. Наличие отдельных плоскостей, уголков, элементов с резонансным характером отражений приводит к тому, что в элемент разрешения попадает небольшое число мощных отражателей.
 с четырьмя с четырьмя

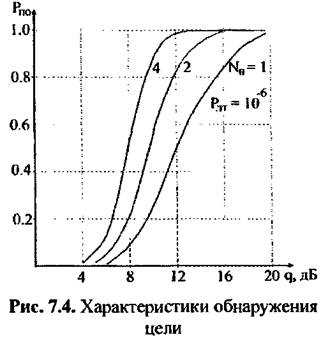
 в элементе разрешения обычно характеризуется экспоненциальным законом: в элементе разрешения обычно характеризуется экспоненциальным законом:
 при четырехкратном обзоре. при четырехкратном обзоре.
Рассмотрим определение дальности обнаружения для четырех типовых задач.


 . В этом случае дальность обнаружения разрешаемого элемента цели (дальность картографирования) можно получить, подставляя в (7.15) значение . В этом случае дальность обнаружения разрешаемого элемента цели (дальность картографирования) можно получить, подставляя в (7.15) значение


Характеристики обнаружения пространственно-распределенной цели (фона) отличаются от характеристик обнаружения точечной цели. Во-первых, распределение ЭПР элемента фона подчиняется экспоненциальному (а не хи-квадрат) закону (в сантиметровом диапазоне радиоволн). Во-вторых, пространственно-распределенная цель содержит большое количество компактно расположенных элементов разрешения
 , при которой отношение сигнал/шум , при которой отношение сигнал/шум
равно единице, т.е. О дБ.
Потери при обработке сигнала фона на 3...5 дБ меньше, чем при обработке сигнала точечной цели. Это объясняется прежде всего малым влиянием рассогласования характеристик фильтра и сигнала фона, так как рассогласование приводит только к перераспределению сигнала фона между элементами разрешения, не изменяя его общей мощности.
 (округлено). Как и ранее полагаем, что внутренний шум превосходит по мощности все другие помехи. (округлено). Как и ранее полагаем, что внутренний шум превосходит по мощности все другие помехи.
3. При обнаружении точечной цели на сильноотражающем фоне влиянием внутренних шумов и помех обычно пренебрегают. В этом случае характеристики обнаружения определяются отношением сигнал/фон для одного элемента разрешения. Мощность сигнала фона в элементе разрешения зависит от удельной ЭПР фона и разрешения РСА:
 близок к единице, то близок к единице, то

Дальность обнаружения малоразмерной цели на сильноотражающем фоне определяется двумя условиями: 1) обеспечением на этой
 , при котором влиянием шумов по сравнению с фоном можно пренебречь. , при котором влиянием шумов по сравнению с фоном можно пренебречь.
 для ее обнаружения на фоне степь летом для ее обнаружения на фоне степь летом



Для рукотворных объектов (корабли, танки, ракетные комплексы, самолеты на стоянке и т.п.) при высоком разрешении справедлива эмпирическая формула оценки ЭПР разрешаемого элемента и объекта в целом:

 - площадь объекта или его разрешаемого элемента. - площадь объекта или его разрешаемого элемента.
При этом полагается, что площадь объекта больше или равна площади элемента разрешения РСА. В этом случае требуемое для обнаружения цели на фоне отношение сигнал/фон

 дБ (при 4-кратном обзоре) обеспечивается на дБ (при 4-кратном обзоре) обеспечивается на
любом фоне, удельная ЭПР которого меньше -10 дБ (городские постройки).
Особый случай представляет обнаружение объектов, находящихся под слоем растительности, почвы, снега, а также замаскированных специальными радиопоглощающими покрытиями.
Аналогично определяется возможность обнаружения объектов, покрытых слоем почвы и снега. В этом случае поглощение сигнала и соответственно уменьшение действующей ЭПР объекта определяется толщиной покрытия и коэффициентом поглощения материала покрытия.
При обнаружении объектов, находящихся под пологом леса, степень поглощения определяется длиной пути распространения электромагнитных волн в кронах деревьев (до объекта и обратно):

 - угол падения волны. - угол падения волны.
 . В этом случае задача обнаружения сводится к различению двух сигналов, отличающихся средней мощностью. . В этом случае задача обнаружения сводится к различению двух сигналов, отличающихся средней мощностью.
 (шумами приемника, АЦП, процессора и внешними помехами): (шумами приемника, АЦП, процессора и внешними помехами):

 - коэффициент, учитывающий характеристики РЛС. - коэффициент, учитывающий характеристики РЛС.
В соседних с целью разрешаемых элементах фона уровень мощности сигнала в основном определяется отражениями от фона:

 (контраст изображения): (контраст изображения):

Плотность вероятности мощности сигналов фона и цели распределяется по экспоненциальному закону (для одного обзора). На рис. 7.6 даны характеристики обнаружения элементов цели с отрицательным
Сервис онлайн-записи на собственном Telegram-боте
Попробуйте сервис онлайн-записи VisitTime на основе вашего собственного Telegram-бота:
— Разгрузит мастера, специалиста или компанию;
— Позволит гибко управлять расписанием и загрузкой;
— Разошлет оповещения о новых услугах или акциях;
— Позволит принять оплату на карту/кошелек/счет;
— Позволит записываться на групповые и персональные посещения;
— Поможет получить от клиента отзывы о визите к вам;
— Включает в себя сервис чаевых.
Для новых пользователей первый месяц бесплатно.
Зарегистрироваться в сервисе
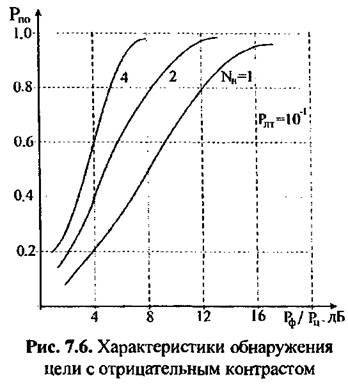
контрастом в зависимости от контраста изображения. Поскольку число элементов разрешения цели и фона велико, вероятность ложной тревоги (вероятность принятия цели за фон в одном элементе разрешения) можно задавать достаточно
 на на
 , что обеспечивает обнаружение дороги в лесу при однократном обзоре. , что обеспечивает обнаружение дороги в лесу при однократном обзоре.
Дальность обнаружения цели с отрицательным контрастом определяется условием, при котором можно пренебречь влиянием шумов на величину контраста изображения.
|

