РадиоведениеМетоды обратного (инверсного) синтезирования апертуры

 . При использовании единой антенны на передачу . При использовании единой антенны на передачу

 обеспечивается такое же обеспечивается такое же
разрешение, как и при синтезировании апертуры за счет движения приемопередающей антенны РЛС:

 , что обеспечивает угловое разрешение , что обеспечивает угловое разрешение

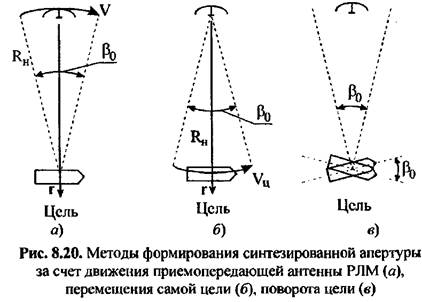
Методы синтезирования, основанные на использовании перемещения и (или) вращения цели, получили название обратное (инверсное) синтезирование. Характерными примерами использования обратного синтезирования являются:
получение радиолокационных портретов морских целей (кораблей) за счет использования их качки и рыскания по курсу;
распознавания групповых воздушных целей;
оценка ЭПР элементов цели, разрешаемых за счет их вращения на стенде и др.
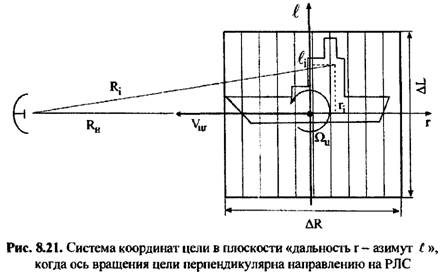
Рассмотрим траекторный сигнал РЛС при обратном синтезировании апертуры. Фаза и задержка траекторного сигнала как основные источники информации о цели определяются изменением расстояния до элементов цели в процессе синтезирования апертуры. В общем случае расстояние изменяется вследствие перемещения цели относительно РЛС и вращения цели. При этом цель может одновременно вращаться в различных плоскостях с различной угловой скоростью.
 - радиальная скорость цели в направлении РЛС. - радиальная скорость цели в направлении РЛС.
 , а доплеровская частота , а доплеровская частота

 , без учета начальной фазы , без учета начальной фазы

 образуется вследствие радиального перемещения одновременно всех элементов цели относительно РЛС. Обычно производится оценка и компенсация этой частоты в сигнале. образуется вследствие радиального перемещения одновременно всех элементов цели относительно РЛС. Обычно производится оценка и компенсация этой частоты в сигнале.
 образуется в результате линейной образуется в результате линейной

 относительно центра вращения цели. Разрешение элементов цели по частотной модуляции траекторных сигналов при малом размере синтезирования апертуры невелико. Поэтому разрешение по дальности обеспечивается модуляцией зондирующего сигнала. При этом в алгоритме обработки траекторного сигнала необходимо учитывать изменение как частоты сигнала, так и его задержки относительно центра вращения цели. Разрешение элементов цели по частотной модуляции траекторных сигналов при малом размере синтезирования апертуры невелико. Поэтому разрешение по дальности обеспечивается модуляцией зондирующего сигнала. При этом в алгоритме обработки траекторного сигнала необходимо учитывать изменение как частоты сигнала, так и его задержки

 будут связаны следующим условием будут связаны следующим условием
 (8.59) (8.59)
 а координата а координата

Для методов обратного синтезирования применительно к РЛС землеобзора характерны следующие основные особенности:
цель движется как единый объект, т.е. отдельные элементы цели перемещаются по взаимосвязанным траекториям;
при наблюдении одиночных объектов, например кораблей, размер зоны обзора определяется размером объекта;
разрешение по угловой координате определяется углом поворота цели относительно направления на РЛС за время синтезирования;
угловой размер апертуры обычно не превышает десятка градусов, так как при этом уже достигается разрешение порядка нескольких длин волн;
разрешение по дальности обеспечивается, как и при прямом синтезировании, за счет модуляции зондирующего сигнала;
параметры траекторного сигнала определяются параметрами движения цели (векторами линейной и угловой скоростей), которые в большинстве случаев неизвестны наблюдателю. Это требует адаптивной к параметрам движения цели обработки траекторного сигнала и большого объема априорных сведений о цели.
Полоса доплеровских частот траекторного сигнала и, следовательно, требуемая частота повторения зондирующих импульсов определяются размером цели (зоны обзора) по азимуту:

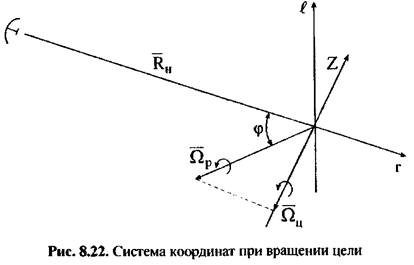
 , образованный одновременным перемещением цели в различных плоскостях, не перпендикулярен направлению наблюдения. Тогда вектор скорости , образованный одновременным перемещением цели в различных плоскостях, не перпендикулярен направлению наблюдения. Тогда вектор скорости
 . Масштаб изображения цели по азимуту, как и ранее, определяется угловой скоростью вращения цели . Масштаб изображения цели по азимуту, как и ранее, определяется угловой скоростью вращения цели
 (8.61) (8.61)

Применение метода обратного синтезирования в РЛС землеобзора. В РЛС землеобзора этот метод используется для получения изображений морских целей (кораблей). Он дает возможность получения высокого разрешения в передней зоне обзора РСА, так как необходимый угловой размер синтезированной апертуры обеспечивается за счет собственного движения (перемещения и вращения) корабля. Кроме того, обратное синтезирование апертуры позволяет получить высокое разрешение не только в плоскости дальность - азимут, но и в плоскости дальность — угол места. Применительно к наблюдению кораблей это позволяет получить изображение вертикального контура надстроек кораблей, что особенно важно при решении задачи распознавания морских целей.
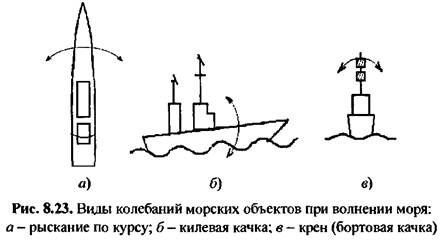
Одновременно с перемещением по курсу при волнении моря корабль испытывает также колебания корпуса вокруг центра масс. Для задач обратного синтезирования обычно используют рыскание по курсу, килевую и бортовую качку корабля. Рыскание по курсу (рис. 8.23,а) соответствуют вращению корабля относительно вертикальной оси. Килевая качка (попеременный дифферент на нос и на корму) соответствует вращению корабля относительно поперечной горизонтальной оси (рис. 8.23,6). Попеременный крен (бортовая качка) на левый и правый борт соответствует вращению корабля относительно продольной горизонтальной оси (рис. 8.23,в). На рис. 8.23 все оси вращения перпендикулярны плоскости рисунка.
Вращение корабля (качка, рыскание) носят периодический характер, т.е. угол отклонения корабля от равновесного (нормального) положения изменяется в соответствии с гармоническим законом:

 - период колебаний. Угловая скорость вращения изменяется по гармоническому закону: - период колебаний. Угловая скорость вращения изменяется по гармоническому закону:

Максимальное значение скорости

достигается в момент прохождения равновесного (как при отсутствии волнения моря) положения корабля.
 определяется многими факторами: высотой волн, направлением бега волн относительно курса корабля, скоростью движения и конструкцией корабля. Большой корабль как колебательная система эквивалентен узкополосному фильтру, и параметры его колебаний (амплитуду и период) можно считать постоянными за время синтезирования порядка долей секунд, С уменьшением водоизмещения корабля (менее 1000 т) амплитуда и период отклонения уже зависят от характеристик волнения моря и носят случайный характер. Обычно считают, что угол р является узкополосным нормальным процессом. определяется многими факторами: высотой волн, направлением бега волн относительно курса корабля, скоростью движения и конструкцией корабля. Большой корабль как колебательная система эквивалентен узкополосному фильтру, и параметры его колебаний (амплитуду и период) можно считать постоянными за время синтезирования порядка долей секунд, С уменьшением водоизмещения корабля (менее 1000 т) амплитуда и период отклонения уже зависят от характеристик волнения моря и носят случайный характер. Обычно считают, что угол р является узкополосным нормальным процессом.
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
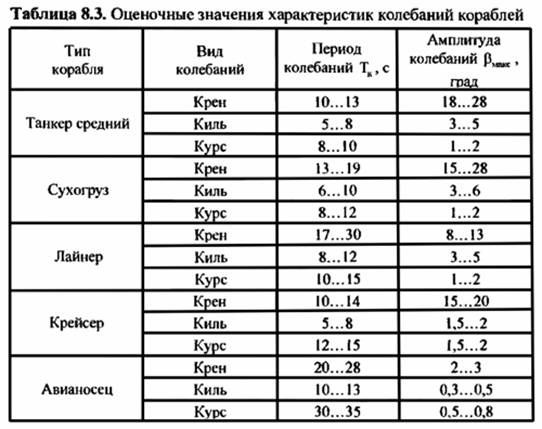
В табл. 8.3 даны оценочные значения характеристик колебаний кораблей различного типа при волнении моря 5-6 баллов.
Если линия визирования корабля перпендикулярна оси угловых колебаний (вращения), возможно получение изображения корабля в различных плоскостях. Килевая качка обеспечивает получение изображения вдоль корабля и его надстроек, качка по крену - изображение в боковом направлении корабля и надстроек, рыскание по курсу - изображение корабля в горизонтальной плоскости. Движение корабля с постоянными скоростью и курсом эквивалентно движению РЛС при неподвижном корабле и обеспечивает изображение в горизонтальной плоскости. В реальной ситуации одновременно существуют все виды колебаний корабля, что затрудняет определение положения плоскости изображения относительно корабля. В то же время, наблюдая динамическое изображение корабля, т.е. изображение, изменяющееся в зависимости от фазы колебаний корабля во время синтезирования, можно эффективно распознавать его класс.
 расстояния расстояния
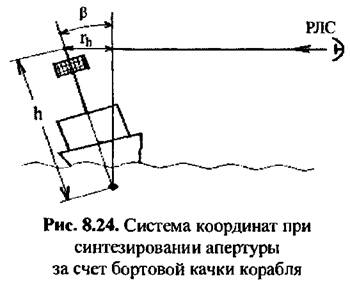
от надстройки на высоте Ь до РЛС (рис. 8.24) определяется выражением

где Ь — высота элемента надстройки, отсчитываемая от оси вращения корабля.
 (в радианах), изменение расстояние до РЛС и, следовательно, фазы отраженного сигнала можно представить в виде (в радианах), изменение расстояние до РЛС и, следовательно, фазы отраженного сигнала можно представить в виде
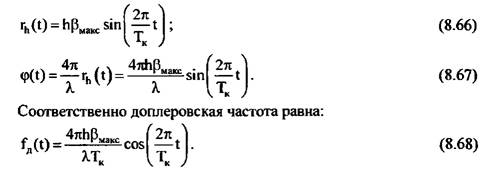
 через ноль, когда угловая скорость отклонения максимальна (см. 8.64): через ноль, когда угловая скорость отклонения максимальна (см. 8.64):
 изменяется незначительно и каждому элементу надстройки по высоте соответствует своя доплеровская частота изменяется незначительно и каждому элементу надстройки по высоте соответствует своя доплеровская частота

 за время синтезирования за время синтезирования

получим разрешение по высоте надстройки корабля

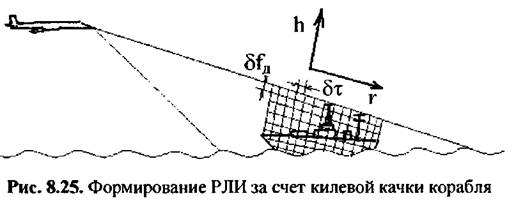
Алгоритм обработки сигналов сводится к доплеровской фильтрации в каждом элементе разрешения по наклонной дальности. Полученные зависимости справедливы и при килевой качке корабля и радиолокационном наблюдении в передней зоне обзора РЛС на встречных курсах самолета - носителя РСА и корабля (рис. 8.25). Разрешение по доплеровской частоте в этом случае соответствует разрешению по высоте надстройки Ь, а разрешение по задержке зондирующего импульса соответствует разрешению вдоль корабля.
При увеличении времени синтезирования начинают сказываться изменения доплеровской частоты и задержки сигнала, что необходимо учитывать в алгоритме обработки. Предельное разрешение без учета изменений задержки и частоты ограничено величиной (8.59)
 при постоянном времени синтезирования разрешение будет ухудшаться. при постоянном времени синтезирования разрешение будет ухудшаться.
 можно получить, измеряя характеристики сигнала в каждом доплеровском канале на выходе моноимпульсной антенны. можно получить, измеряя характеристики сигнала в каждом доплеровском канале на выходе моноимпульсной антенны.
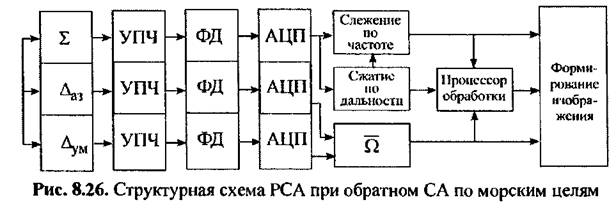
Упрощенная структурная схема РСА при обратном синтезировании по морским целям представлена на рис. 8.26. Антенная система формирует три пространственных канала приема: суммарный и два разностных (в горизонтальной и вертикальной плоскостях). После преобразования на промежуточной частоте принимаемые сигналы с помощью фазовых детекторов и АЦП превращаются в цифровые сигналы. Система слежения по частоте определяет среднюю доплеровскую частоту принимаемых сигналов и ее изменение для компенсации в процессе обработки сигналов (автофокусировка), а также измеряет изменение задержки огибающей сигналов для ее компенсации при синтезировании апертуры. Система измерения вектора угловой скорости вращения (колебания) корабля обеспечивает определение масштаба и ориентации в пространстве изображения корабля.
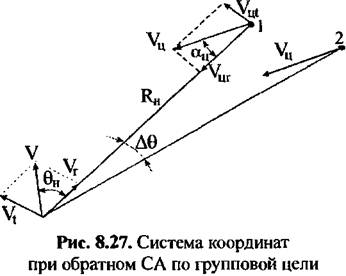
Перемещение цели, так же как и движение носителя РЛС, создает эффект синтезирования апертуры, угловой размер которой определяется взаимным угловым перемещением РЛС и цели. Покажем это на примере разрешения элементов групповой цели (рис, 8.27), состоящей из двух синхронно движущихся малоразмерных объектов (точечных целей).


 , доплеровская частота изменяется так, что разница частот сигналов двух целей, движущихся с одинаковой скоростью, составляет , доплеровская частота изменяется так, что разница частот сигналов двух целей, движущихся с одинаковой скоростью, составляет

 - соответственно тангенциальные составляющие скорости РЛС и целей. - соответственно тангенциальные составляющие скорости РЛС и целей.

 - угловая скорость вращения линии визирования - угловая скорость вращения линии визирования
РЛС - цель.
Алгоритм обработки траекторного сигнала при наблюдении груп новой цели определяется фазовой структурой сигнала, которая в свою очередь зависит от взаимного перемещения (траекторий) РЛС и целей.
При прямолинейных траекториях и постоянных скоростях движения относительное расстояние РЛС — цель (см. рис. 8.27)

Фазовая функция траекторного сигнала (без учета несущественной начальной фазы)

Соответственно доплеровская частота траекторного сигнала

Для цели, смещенной на угол А 6 , доплеровская частота траекторного сигнала

 . Второй . Второй

 в общем случае неизвестны , требуется в общем случае неизвестны , требуется
адаптивная к этим параметрам система обработки, например с помощью автофокусировки.
 При энергичном маневре самолетов При энергичном маневре самолетов
 см время синтезирования может изменяться от 0,5 до 0,05 с. При адаптивной обработке, например автофокусировке, это время может быть значительно увеличено. см время синтезирования может изменяться от 0,5 до 0,05 с. При адаптивной обработке, например автофокусировке, это время может быть значительно увеличено.
|

