Теория систем автоматического управленияПримеры дискретных и релейных автоматических систем
Чтобы наглядно представить себе принцип работы простейшей импульсной системы, покажем, как ее можно получить из обыкновенных линейных систем непрерывного действия, т. е. из тех систем, которые рассматривались в предыдущих параграфах.
Возьмем систему стабилизации температуры непрерывного действия (рис. 1.17). Необходимо поддерживать постоянную температуру объекта, охлаждаемого воздухом. Управляющим органом являются шторки, угловое положение которых ф определяет собой интенсивность поступления охлаждающего воздуха.
Измерительное устройство состоит из терморезистора 1, включенного в качестве
одного из плеч моста 2, и гальванометра 3, измеряющего ток в диагонали моста. Мост 2 настраивается так, что при заданной температуре, которую надо поддерживать неизменной, ток в диагонали моста отсутствует. Таким образом, измерительное устройство (1,2,3) дает па выходе перемещение стрелки .s, пропорциональное отклонению температуры 0.
 Стрелка скользит по потенциометру 4, управляющему работой двигателя 5. Якорь двигателя питается через потенциометр (иногда дополненный усилителем). Двигатель 5 через редуктор 6 вращает шторки. Стрелка скользит по потенциометру 4, управляющему работой двигателя 5. Якорь двигателя питается через потенциометр (иногда дополненный усилителем). Двигатель 5 через редуктор 6 вращает шторки.
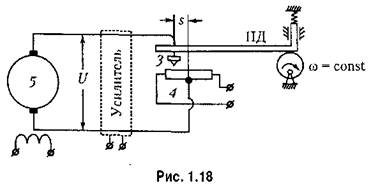
Существенным недостатком данной конкретной системы является то, что стрелка гальванометра 3 имеет значительную механическую нагрузку в виде трения об обмотку потенциометра. Это заметно снижает чувствительность измерителя, а значит, и всей системы к малым отклонениям регулируемой величины 0, Целесообразно было бы предоставить стрелке гальванометра возможность двигаться свободно без нагрузки. Это делается следующим образом.
На рис. 1.18 изображен вид на стрелку гальванометра 3 с торца (с носика). Носик стрелки движется вправо и влево свободно, не прикасаясь к обмотке потенциометра. Над стрелкой помещена так называемая падающая дужка ПД, опирающаяся па эксцентрик, который вращается с постоянной угловой скоростью со. Когда падающая дужка приходит в нижнее положение, она прижимает стрелку гальванометра 3 к обмотке потенциометра 4 на короткое время, В течение остального периода колебаний дужки стрелка 3 свободна.
 питающее цепь якоря двигателя, будет подаваться с потенциометра в виде коротких импульсов (рис. 1.19). питающее цепь якоря двигателя, будет подаваться с потенциометра в виде коротких импульсов (рис. 1.19).
Постоянный период чередования импульсов, или период дискретности T задается системе принудительно извне и определяется величиной угловой скорости со вращения эксцентрика независимым от данной системы приводом. Длительность импульсов т тоже постоянна.
 примерно пропорциональна примерно пропорциональна

 В первом приближении они равномерно движутся во время подачи импульса и затем стоят па месте в промежутке между импульсами. В первом приближении они равномерно движутся во время подачи импульса и затем стоят па месте в промежутке между импульсами.
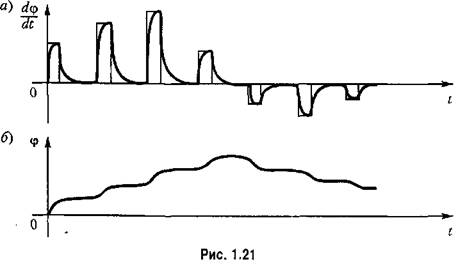
На самом же деле, конечно, за счет инерционности двигателя при подаче импульса напряжения нарастание и
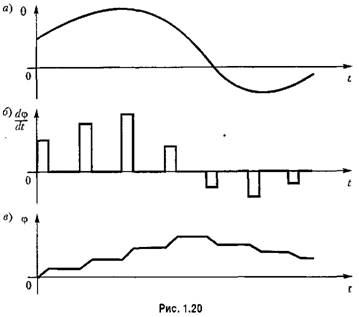
 будет происходить не мгновенно, как на рис. 1.20, б, а по не которой кривой (рис. 1.21, а). будет происходить не мгновенно, как на рис. 1.20, б, а по не которой кривой (рис. 1.21, а).
 на объект будет иметь несколько сглаженный вид (рис.1.21, б). Отсюда видно, что необходимо разумно выбирать величины периода дискретности T и длительности т импульсов. Устройство, преобразующее непрерывную входную величину в дискретную, т. е; в последовательность импульсов, называется импульсным элементом, или импульсным модулятором, а сам процесс преобразования — импульсной модуляцией. В современных системах автоматического управления используются амплитудно-импульсная, широтно-импульсная и (гораздо реже) частотно-импульсная модуляция. на объект будет иметь несколько сглаженный вид (рис.1.21, б). Отсюда видно, что необходимо разумно выбирать величины периода дискретности T и длительности т импульсов. Устройство, преобразующее непрерывную входную величину в дискретную, т. е; в последовательность импульсов, называется импульсным элементом, или импульсным модулятором, а сам процесс преобразования — импульсной модуляцией. В современных системах автоматического управления используются амплитудно-импульсная, широтно-импульсная и (гораздо реже) частотно-импульсная модуляция.
При амплитудно-импульсной модуляции с изменением входной величины изменяется амплитуда импульсов (рис. 1.19), а их длительность т и период дискретности Г остаются постоянными.
При широтио импульсной модуляции с изменением входной величины изменяется длительность (ширина) импульсов, а их амплитуда и период дискретности Т
остаются постоянными (рис. 1.22),
При частотно-импульсной модуляции с изменением входной величины изменяется частота следования импульсов, а их амплитуда и длительность остаются постоянными.
Первые в истории техники импульсные элементы были

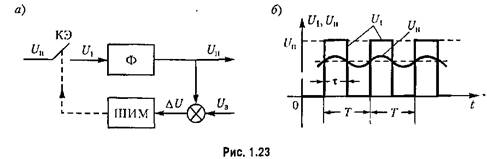
ачектромеханическими (см. рис. 1.18). Основной смысл их введения в автоматические системы состоял в освобождении измерительного устройства от нагрузки на его выходе. В современных автоматических системах преимущественно используются электронные и микроэлектронные модуляторы. Они широко применяются для управления электрическими двигателями и приводами летательных аппара тов, для стабилизации напряжения в электрических сетях и в ряде других случаев.
 то ширина импульсов па выходе ШИМ увеличивается, в результате то ширина импульсов па выходе ШИМ увеличивается, в результате
 длительность импульсов т, наоборот, уменьшается. В качестве ключевого элемента может быть использован, например, силовой транзистор. длительность импульсов т, наоборот, уменьшается. В качестве ключевого элемента может быть использован, например, силовой транзистор.
В отличие от стабилизаторов напряжения непрерывного действия, в которых весь избыток энергии превращается в тепло, здесь от первичного источника отбирается столько энергии, сколько необходимо потребителю. Поэтому и коэффициент полезного действия у импульсных стабилизаторов значительно выше.
При широтпо-импульсном управлении скоростью вращения электрического двигателя не только экономится энергия, но и обеспечивается плавность хода на малых (так называемых ползучих) скоростях. Это объясняется следующим. При непрерывном управлении для обеспечения малой скорости на двигатель необходимо подавать небольшое напряжение, сопоставимое с напряжением трогания двигателя. Поэтому вращение происходит рывками. При широтпо-импульсном управлении на двигатель подается максимальное напряжение, но в течение небольшого промежутка времени т.
В разделе III будет показано, что широтпо-импульсный модулятор в отличие от амплитудно-импульсного модулятора является нелинейным звеном. Поэтому и система с широтно-импульсной модуляцией становится нелинейной дискретной.
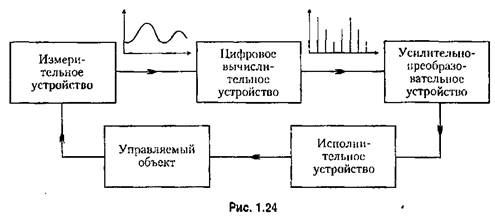
К дискретным системам относятся и системы автоматического управления в тех случаях, когда в замкнутый контур системы включается цифровое вычислительное устройство. Это устройство бывает необходимо в тех случаях, когда, например, измерительные приборы в системе управления не могут измерить непосредственно отклонение управляемой величины о г требуемого (программного) значения, а оно должно вычисляться по определенным формулам через показания измерительных приборов.
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
В других случаях цифровое устройство может служить для вычисления не только отклонения, по и самого программного значения управляемой величины, по каким-либо критериям наилучшего качества работы данной системы, а также для формирования алгоритма управления. Цифровое устройство может выполнять и другие весьма разнообразные функции.
Система управления в этих случаях будет работать как дискретная, потому что цифровое устройство выдает результат вычисления дискретно, т. е. через некоторые промежутки времени, необходимы: для производства вычисления.
Включение цифрового вычислительного устройства в контур системы управления сопряжено с преобразованием непрерывных величин в цифровой код на входе и с обратным преобразованием на выходе (рис. 1.24).
При этом выходная величина из-за удобства технической реализации обычно формируется в виде последовательности импульсов, модулированных по амплитуде пли по ширине.

Релейные системы автоматического управления можно отнести, как и импульсные, описанные выше, к категории систем прерывистого действия, но их существенное отличие от импульсных систем заключается в том, что релейные системы по самому принципу своему являются нелинейными. Дело в том, что здесь моменты времени, в которые происходит замыкание и размыкание системы, заранее неизвестны; они не задаются извне, а определяются внутренними свойствами самой системы (ее структурой и величинами ее параметров). Этим обусловливаются и основные специфические особенности динамики процессов управления в релейных системах.
В качестве первого примера релейной системы рассмотрим систему стабилизации температуры примерно той же структуры, как на рис. 1.17, но с тем отличием, что вместо импульсного элемента для управления работой привода шторок в пей поставлено релейное звено — в данном случае поляризованное реле 3 (рис. 1.25). Его средний контакт в зависимости от знака тока в диагонали моста 2, т. е, в зависимости от знака отклонения управляемой величины 0, замыкается с нижним или верхним контактом, включая ток либо в одну, либо в другую обмотку возбуждения двигателя, в результате чего получаем либо одно, либо другое направление движения шторок па объекте.
 от входной / называется статической характеристикой реле. от входной / называется статической характеристикой реле.
 - тока отпускания. Эта петля аналогична той, которая получается при гистерезисиых явлениях. Поэтому и в данном случае ее называют гистерезисиой петлей. Если петля не широка, то ею часто пренебрегают, - тока отпускания. Эта петля аналогична той, которая получается при гистерезисиых явлениях. Поэтому и в данном случае ее называют гистерезисиой петлей. Если петля не широка, то ею часто пренебрегают,

Зона нечувствительности реле, имеющая место в этих двух статических характеристиках, получается в том случае, когда средний контакт поляризованного реле обладает нейтральным положением. Если этого нет, то он будет сразу перескакивать из одного крайнего положения в другое (рис. 1.26, в). Это — идеальная релейная характеристика без зоны нечувствительности и без петли. Реальная характеристика реле и в данном случае тоже будет иметь петлю (рис. 1.26, г), половину ширины которой обозначаем через Ъ. Это — характеристика реле с петлей без зоны нечувствительности, т. е. без среднего нейтрального положения.
В приведенном примере в релейную систему входило электромагнитное реле, управляющее работой привода двигателя. Однако к релейным системам управления относятся не только системы, содержащие именно реле, а всякие системы, в составе
которых есть звенья (любой физической природы), обладающие статическими характеристиками релейного типа, когда выходная величина звена изменяется скачкообразно при непрерывном изменении входной величины.
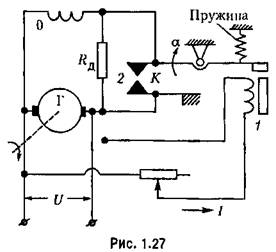
Приведем типичный пример релейной системы, в которой сам управляющий орган работает в двухпозициоином режиме. Это — вибрационный регулятор напряжения на клеммах генератора постоянного тока. Принципиальная схема показана па рис, 1.27. Управляемая величина — напряжение (У. При отклонении напряжения изменяется ток в обмотке электромагнита. Это создает изменение тяговой силы

электромагнита. При уменьшении последней пружина замыкает контакты К, выключая добавочное сопротивление Кл из цени возбуждения генератора. Следовательно, управляющий орган (контакты) здесь будет иметь релейную характеристику, показанную на рис. 1,28.
Релейные системы по сравнению с непрерывными системами обладают тем преимуществом, что не требуют высокой стабильности элементов для соблюдения определенной зависимости между выходной и входной величинами. . Они работают но принципу да-нет, т. е. по наличию или отсутствию входного сигнала и его знаку (с определенным порогом срабатывания).
|

