Асинхронные двигатели с фазным роторомЭлектропривод с асинхронными двигателями
Понятие об электроприводе
Любое машинное устройство состоит из машины-двигателя, передаточного механизма и рабочего механизма.
Двигатель и передаточный механизм называют приводом, так как они служат для передачи мощности и движения рабочему механизму (машине) с нужной угловой частотой вращения.
В настоящее время в качестве двигателей используются простые в управлении, экономичные, надежные в эксплуатации электрические двигатели, поэтому привод современных производственных механизмов получил название электропривода. Функциональная схема электропривода изображена на рис. 5.1.
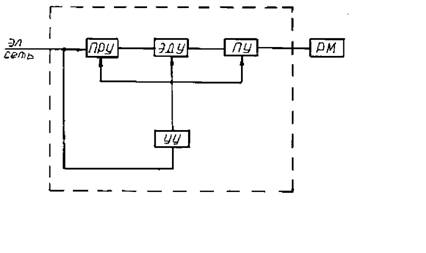
Рис. 5.1. Функциональная схема электропривода: ПРУ - преобразующее устройство; ЭДУ - электродвигательное устройство; ПУ - передающее устройство; УУ -у правляющее устройство
В современном автоматизированном электроприводе существенную роль играют преобразовательные (ПРУ ) установки (выпрямительные устройства, регуляторы напряжения, частоты и др.) и аппаратура управления (УУ), совместная работа которых обеспечивает надлежащий ход технологического процесса.
Электродвигатель, приводя во вращение рабочий механизм, развивает вращающий момент М. Вал двигателя передает вращение валу рабочего механизма, преодолевая сопротивление со стороны последнего. Величину этого сопротивления оценивают с помощью момента статического сопротивления М с. Если вращающий момент, развиваемый двигателем, уравновешивает момент сопротивления, т.е. когда М = М с, то вращение происходит с неизменной установившейся частотой вращения nуст , которая может быть определена по точке пересечения совмещенных механических характеристик двигателя и рабочего механизма, построенных в одном масштабе (рис. 5.2).
Нарушение равновесия моментов М и М с приводит к изменению скорости вращения привода.
При условии M > Mc привод получит ускорение, а при Mc > M - замедление. Увеличение или уменьшение частоты вращения происходит под действием динамического момента Мдин . Реализация динамического момента связана с изменением кинетической энергии, запасенной в движущихся частях машинного устройства.

 но устойчивое вращение ротора возможно только в точке а. но устойчивое вращение ротора возможно только в точке а.
 на рис. 5.2). на рис. 5.2).
 на рис. 5.2). на рис. 5.2).


 двигатель перейдет в движение с замедлением, вращающий момент и частота вращения его будут уменьшаться от точки в по кривой механической характеристики вниз до полной остановки электропривода (см. рис. 5.2). двигатель перейдет в движение с замедлением, вращающий момент и частота вращения его будут уменьшаться от точки в по кривой механической характеристики вниз до полной остановки электропривода (см. рис. 5.2).
 (см. рис. 5.2). (см. рис. 5.2).
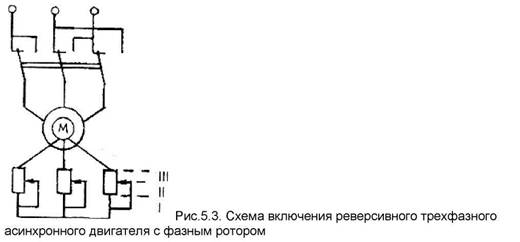
В асинхронном двигателе с фазным ротором имеется возможность увеличения момента в период пуска за счет искусственного увеличения активного сопротивления в фазах обмотки ротора (рис. 5.3).
|

