Асинхронные двигатели с фазным роторомРегулирование частоты вращения ротора асинхронного двигателя
Возможность регулирования частоты вращения электропривода в широких пределах простыми, экономически выгодными способами является важным его достоинством. К сожалению асинхронные машины к такому классу двигателей не относятся.
 и скольжение S и скольжение S

 - частота переменного тока питающей трехфазной цепи; р - число пар полюсов двигателя. - частота переменного тока питающей трехфазной цепи; р - число пар полюсов двигателя.
Из выражения (5.1) следует, что частоту вращения двигателя можно регулировать:
изменением частоты напряжения питающей сети;
переключением обмоток статора на разное число пар полюсов (ступенчатое регулирование);
искусственным изменением скольжения при данной нагрузке.
Первые два способа, их преимущества и недостатки, описаны в [4,5,6].
Последний способ, несмотря на неэкономичность, но благодаря своей простоте, нашел широкое применение для привода подъемно-транспортных механизмов.
Регулирование частоты вращения двигателя изменением скольжения осуществляется при введении в цепь фазного ротора регулировочных сопротивлений (см. рис. 5.3). С увеличением сопротивления в цепи обмотки ротора характеристики становятся более мягкими.
 (рис. 5.4, кривая I). (рис. 5.4, кривая I).

 (см. рис. 5.4.), и пока сохраняется условие (см. рис. 5.4.), и пока сохраняется условие
 будет происходить разгон до второй установившейся частоты будет происходить разгон до второй установившейся частоты
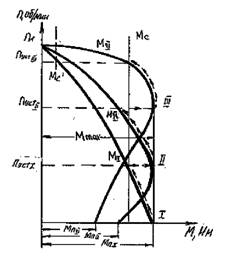
 третьем третьем
 Т аким образом, установившиеся частоты вращения при этом способе регулирования зависят как от вида механических характеристик двигателя, так и от величины момента статического сопротивления рабочего механизма. И если момент сопротивления невелик, например М с на рис. 5.4, то частота вращения вращения практически не регулируется, так как она в этом случае близка к синхронной. Т аким образом, установившиеся частоты вращения при этом способе регулирования зависят как от вида механических характеристик двигателя, так и от величины момента статического сопротивления рабочего механизма. И если момент сопротивления невелик, например М с на рис. 5.4, то частота вращения вращения практически не регулируется, так как она в этом случае близка к синхронной.
Рис. 5.4. Регулирование частоты вращения введением сопротивлений в цепь фазного ротора
5.3. Расчет пусковых характеристик асинхронного двигателя с фазным ротором
Включение добавочных резисторов в цепь обмоток ротора применяется с целью регулирования как момента, так и частоты вращения ротора. Ниже рассматривается расчет сопротивлений для получения необходимого пускового момента, установившихся частот вращения и числа ступеней пусковой диаграммы.
|

