Кузнечно-штамповочное оборудованиеПривод раскатной головки
 - определяет устройство привода. В существующих конструкциях прессов с орбитально-вращающейся РГ такое устройство реализуют либо с использованием одного водила, вращающегося на главном валу, либо двух эксцентричных шайб. - определяет устройство привода. В существующих конструкциях прессов с орбитально-вращающейся РГ такое устройство реализуют либо с использованием одного водила, вращающегося на главном валу, либо двух эксцентричных шайб.

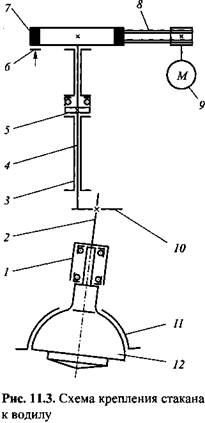
 - хвостовик-вал 2 стакана 1. В самом стакане на двух подшипниках качения размещен хвостовик-вал РГ, благодаря чему головка 12 получает возможность вращаться вокруг своей оси, опираясь на подшипник 11. Полусфера головки 12 при рабочем ходе под действием силы, направленной снизу вверх, опирается на сферический подшипник 77 с антифрикционными вкладышами, например, из бронзы типа БрОФН 10-1-1. - хвостовик-вал 2 стакана 1. В самом стакане на двух подшипниках качения размещен хвостовик-вал РГ, благодаря чему головка 12 получает возможность вращаться вокруг своей оси, опираясь на подшипник 11. Полусфера головки 12 при рабочем ходе под действием силы, направленной снизу вверх, опирается на сферический подшипник 77 с антифрикционными вкладышами, например, из бронзы типа БрОФН 10-1-1.
 (см. рис. 11.2) (см. рис. 11.2)

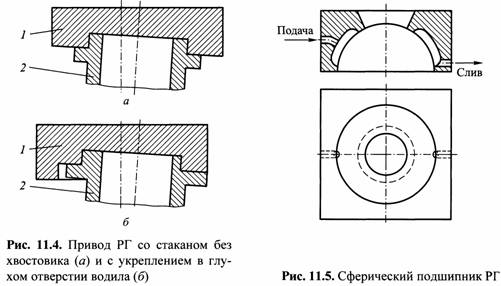
Иной способ крепления стакана к водилу показан на рис. 11.4, а. У стакана 2 нет хвоетовика вала, а его торец установлен в глухом отверстии водила 7. Плоскость этого отверстия, воспринимающая силу от стакана, наклонена к горизонтальной под углом у, что обеспечивает требуемый угол наклона оси РГ.
Крепление стакана этими способами характеризуется повышенной жесткостью, что очень важно для прессов по условию точности штамповки.
Крепление стакана, допускающее плавную регулировку угла наклона, показано на рис. 11.4, б. Для этого вместо соосного торца стакана с отверстием на водиле торец выполняют в виде эксцентриковой шайбы с диаметром, равным диаметру глухого отверстия в водиле. Поворачивая эксцентриковую шайбу, изменяют эксцентриситет оси стакана и тем самым угол наклона оси РГ. Однако вследствие нетехнологичности этот способ можно рекомендовать только для прессов с у<3°. Надежная работа прессов с орбитально-вращающейся РГ во многом зависит от качества функционирования подшипника 77. Высокие давления в связи с ограниченностью радиальных размеров головки и относительно небольшие скорости скольжения не позволяют получить наиболее благопрятный режим - жидкостное трение, обеспечивающее гидродинамическое всплытие полусферы относительно опоры. Поэтому упомянутый режим создают гидростатической подкачкой масла под высоким давлением в разделяющий зазор. Подшипники выполняют цельными или из четырех-шести секций. В теле подшипника предусмотрены накопительные камеры (рис. 11.5), соединенные канавками с напорной магистралью и со сливом. Для предупреждения масляного слоя от перегрева объем прокачки масла должен быть достаточным.
Согласно схеме, приведенной на рис. 11.3, в приводе не предусмотрены муфта включения и действующий совместно с ней тормоз. Поэтому маховик, главный вал
и раскатная головка вращаются все время пока включен электродвигатель. Для остановки привода и РГ необходимо выключить электродвигатель и одновременно тормоз 6 маховика (см. рис. 11.3). Во избежание травматизма из-за работающего в период холостого хода привода необходимо предусмотреть соответствующие мероприятия по технике безопасности (ограждения и т. п.).
Привод РГ показан на рис. 11.6. Его особенностью является то, что оси вала 17 электродвигателя и вала 6 маховика с встроенной фрикционной муфтой и тормозом перпендикулярны оси вращения шайб 4 к 18. Поэтому необходимы преобразователи направления вращения, в данном случае выполненные в виде червячных
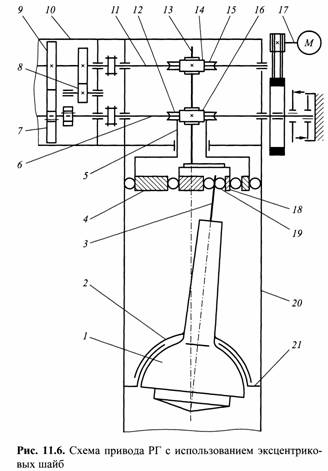
передач. Червяк 16 жестко установлен на нижнем горизонтальном валу 6 - валу маховика, червячное колесо 12 - свободно на вертикальном валу 73. К нижней стороне колеса прикреплен полый вал 5 наружной эксцентриковой шайбы 4, вращающий ее в горизонтальной плоскости.
Для вращения дополнительного верхнего вала 11 предназначена коробка скоростей 10, по типу схожая с таковыми у токарных станков и автомобилей. Коробка передач содержит зубчатые шестерни 9, закрепленные наглухо на валу 77 и вручную смещаемые скользящие 7, расположенные на нижнем валу 6. В зависимости от сцепленной пары зубчатых шестерен и их передаточного числа изменяется частота вращения верхнего вала 77 и вертикального 13. При передаче через промежуточную шестерню 8 оба вала 6 и 11 вращаются в одну сторону. При непосредственном зацеплении ведущей скользящей шестерни с ведомой валы 6 и 11 вращаются в разные стороны.
Червяк 14 и червячное колесо 15 вращают вертикальный вал 73, который проходит через отверстие в червячном колесе 72 с подшипником до соединения с внутренней шайбой 18. Внешняя цилиндрическая поверхность наружной шайбы 4 через подшипник качения оперта на корпус 20 пресса. Ее внутренняя цилиндрическая поверхность и внешняя поверхность внутренней шайбы 18 через шарики образуют также подшипник качения. Хвостовик 3 вала РГ 7 установлен в шариковом подшипнике 19 и свободно вращается в нем относительно собственной оси. Проворотом шайб между собой получают плавную регулировку наклона оси РГ.
Вал РГ имеет дополнительную сферическую опору 2 для удержания головки от сползания вниз из подшипника 19. Сферический подшипник головки установлен на поперечине 21 пресса.
Сложное кинематическое устройство существенно расширяет технологические возможности пресса с таким приводом РГ. Регулирование частотой и направлением вращения, а также эксцентриситетом позволяет обеспечить четыре вида движения пуансона: круговое, как в приводе на рис. 11.3; линейное по прямой, наклоненной под углом к горизонтальной оси матрицы; спиральное и лепестковое (звездообразное). Первый вид движения применим при изготовлении круглых симметричных в плане поковок; второй - для штамповки поковок удлиненной формы; третий - для штамповки поковок, требующих перемещения металла по радиусу с периодическим воздействием на среднюю часть поковки, и четвертый - для штамповки поковок с радиальными ребрами (конические зубчатые колеса и т. п.) по кривым с переменным радиусом.
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
Прессы с подобным приводом РГ изготовляют во многих странах.
|

