РадиоведениеПринципы построения РСА землеобзора
Структурная схема РСА землеобзора
Структурная схема, отражающая основные элементы РСА при решении задач землеобзора, изображена на рис. 5.1. Выбор режимов работы всех устройств РСА осуществляется БЦВМ управления и контроля в соответствии с решаемой тактической задачей. При этом высокостабильный опорный генератор высокочастотных колебаний с помощью синтезатора частот формирует все необходимые колебания как радиочастот (несущих, промежуточных, частот модуляции), так и частот синхронизации, обеспечивая тем самым когерентность приемопередающего тракта РСА. Модулятор формирует заданный вид зондирующего сигнала (амплитудную и фазочастотную модуляцию) на несущей частоте. Усилитель мощности обеспечивает требуемую мощность излучения зондирующего сигнала, сохраняя его когерентность. Через антенный переключатель усиленные колебания поступают в антенну, которая излучает электромагнитную волну в пределах заданной диаграммы направленности.
Поляризация излучаемой и принимаемой волн определяется конструкцией антенны (поляризатора). При полном поляризационном зондировании и приеме антенна формирует четыре независимых канала на прием волн с поляризацией ГГ , ВВ, ГВ и ВГ. Далее в структуре РСА рассматривается один из каналов.
Система стабилизации и управления антенной обеспечивает стабилизацию и перемещение ДН антенны в соответствии с требуемым режимом обзора земной поверхности. Например, при телескопическом обзоре ДН антенны обеспечивает непрерывный подсвет заданного участка земной поверхности путем слежения за ним при изменении траектории движения носителя РСА.
Электромагнитные волны, отраженные от всех объектов в зоне обзора РСА, приходят к антенне и формируют два сигнала, соответствующие суммарной и разностной ДН антенны. В зависимости от решаемой тактической задачи возможно использование различного числа антенных каналов. Так, в режиме измерения координат (азимута) движущейся цели используют три канала. Приемники суммарного и разностного каналов обеспечивают усиление и преобразование сигналов на
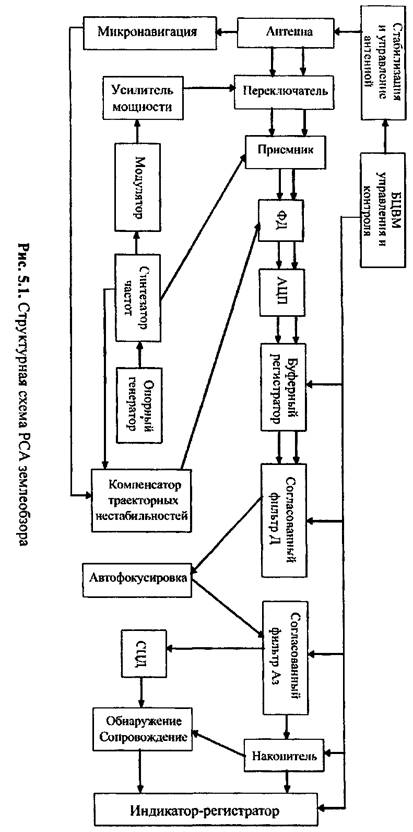
 сигналов в каждом канале. На структурной схеме изображена цифровая система обработки сигналов на борту носителя, когда согласованная фильтрация сигналов по дальности (задержке) и азимуту (частоте траекторного сигнала) осуществляется процессором. При использовании наземной системы обработки (оптической или цифровой) траекторные сигналы (голограмма) записываются регистратором или транслируются на наземный пункт обработки через систему передачи данных с выхода буферного регистра. сигналов в каждом канале. На структурной схеме изображена цифровая система обработки сигналов на борту носителя, когда согласованная фильтрация сигналов по дальности (задержке) и азимуту (частоте траекторного сигнала) осуществляется процессором. При использовании наземной системы обработки (оптической или цифровой) траекторные сигналы (голограмма) записываются регистратором или транслируются на наземный пункт обработки через систему передачи данных с выхода буферного регистра.
Управление системой обработки сигналов по дальности (сжатие) и азимуту (синтезирование) осуществляется БЦВМ. Алгоритмы получения РЛИ с некогерентным накоплением, селекции движущихся целей, обнаружения и сопровождения целей используются в зависимости от решаемой тактической задачи.
На индикаторе телевизионного типа формируется РЛИ наблюдаемого участка земной поверхности и другая информация (координаты целей, отметки движущихся целей, результаты классификации целей и т.п.). Кроме того, РЛИ регистрируется для последующего анализа на земле.
Наличие случайных искажений траекторного сигнала, прежде всего вследствие траекторных нестабильностей, требует их компенсации, особенно при полете в турбулентной атмосфере и высоких требованиях к разрешающей способности РСА. Для этого используются две системы. Инерциальная система микронавигации обеспечивает измерение отклонения движения фазового центра антенны от заданной траектории. Измеренные значения фазовых флуктуации используются для их компенсации с помощью управляемого коммутатора фазы на промежуточной частоте. Система автофокусировки определяет фазовые искажения траекторного сигнала непосредственно по отраженному сигналу от объектов и земной поверхности. Результаты измерений используются при формировании характеристики согласованного фильтра синтезирования апертуры.
В дальнейшем рассматриваются основные требования к параметрам сигналов и устройств РСА.
|

