РадиоведениеАвтофокусировка изображения в РСА
Для обеспечения высокой разрешающей способности РСА по азимуту необходимо с точностью до долей длины волны РСА знать изменение траектории движения фазового центра антенны РЛС на интервале синтезирования. Эта задача решается специализированной ИНС микронавигации, которая измеряет параметры движения носителя РСА (скорости и ускорения по осям нормальной системы координат). Следует отметить исключительно высокие требования к точности датчиков. Создание таких датчиков является сложной технической проблемой, и часто требования к датчикам ИНС не выполняются.
В этом случае для высокоточного измерения фазовых искажений траекторного сигнала используется другой подход. Он основан на том, что сам траекторный сигнал или радиолокационное изображение являются носителями информации о фазовых нестабильностях, которые могут быть измерены с помощью специальной обработки сигнала. Кроме того, при таком методе имеется возможность компенсации фазовых флуктуации, обусловленных не только ТН, а также нестабильностями аппаратуры РСА и среды распространения радиоволн.
Обычно процесс извлечения информации о фазовых искажениях из траекторного сигнала или самого РЛИ и компенсации этих искажений используется для повышения детальности (резкости) получаемого изображения. Потому он часто называется автофокусировкой подобно фокусировке изображения в оптических системах.
Целью автофокусировки является обеспечение заданной разрешающей способности РСА в условиях реального полета при ограниченной точности микронавигационной системы.
В общем случае процесс автофокусировки изображения, применительно к системам РСА, включает в себя два этапа:
оценка фазовой ошибки;
компенсация фазовой ошибки.
Этап 1. Источником информации о фазовых искажениях выступает сам траекторный сигнал. Некоторые алгоритмы автофокусировки требуют явного знания набора коэффициентов, определяющих фазовую ошибку. В других алгоритмах коэффициенты присутствуют неявно, в виде некоторой случайной функции. Простые методы автофокусировки определяют только квадратичный коэффициент фазовой ошибки, в то время как более сложные методы позволяют устранить ошибки практически любого порядка.
Этап 2. При компенсации (удалении) искажений траекторного сигнала используют оценку фазовой ошибки, полученную на первом этапе. Второй этап включает в себя:
расчет опорной функции, компенсирующей траекторные нестабильности; фаза этой опорной функции равна оцененной на предыдущем шаге фазовой ошибке, но взятой с обратным знаком;
умножение траекторного сигнала на опорную функцию;
обработку исправленных данных с помощью алгоритма формирования радиолокационного изображения.
Методы автофокусировки можно разбить на две группы.
В первой группе методов используются мощные сигналы одиночных точечных отражателей (ориентиров). При большом отношении сигнал/шум и сигнал/фон траекторный сигнал ориентира имеет те же фазовые искажения, что и траекторный сигнал цели, расположенной в районе ориентира. Эти искажения измеряются тем или иным способом и затем компенсируются в траекторном сигнале цели. Достоинством этих методов является возможность компенсации всех видов искажений, в том числе быстроизменяющихся в полосе частот до 10...20 Гц. Недостаток метода - необходимость наличия ориентиров в районе цели.
Вторая группа методов использует траекторный сигнал от всех объектов и фона местности в диаграмме направленности антенны. Главным достоинством этих методов является то, что отсутствие точечных отражателей не вызывает срыва работы алгоритмов автофокусировки, а их наличие только повышает эффективность процесса автофокусировки.
Далее рассмотрены четыре практически реализуемых алгоритма автофокусировки:
алгоритм автофокусировки радиолокационного изображения на основе оценки средней доплеровской частоты;
фазоразностный алгоритм автофокусировки;
автофокусировка по сигналам точечных отражателей;
автофокусировка на основе формирования динамического фазового портрета.
Перечисленные выше четыре алгоритма осуществляют оценку фазовой ошибки и выполняют ее компенсацию для всех целей, присутствующих в зоне обзора, независимо от их координат, т.е. выполняется пространственно-инвариантная автофокусировка. Однако в некоторых случаях, например в инверсных РСА, доминирующими являются фазовые ошибки, зависящие от координат объекта.
Пространственно-зависимая автофокусировка по своей сути противоречива, так как большинство алгоритмов автофокусировки для повышения точности оценки траекторных нестабильностей используют усреднение по многим отражателям. В простейшем случае для обеспечения пространственно-зависимой фокусировки все радиолокационное изображение делится на участки, в пределах каждого из которых можно считать фазовую ошибку пространственно-инвариантной. К каждому такому участку можно применять указанные выше алгоритмы автофокусировки. Затем из отдельно сфокусированных участков формируется полное радиолокационное изображение.
Примером пространственно-зависимой фокусировки является получение изображения движущегося корабля. Автофокусировка изображения в этом случае возможна , поскольку движения всех отражателей корабля взаимно коррелированы вследствие жесткости конструкции.
Пространственно-зависимые методы также необходимы для корректировки фазовых ошибок, зависящих от высоты объекта. Такие фазовые ошибки возникают при картографировании гористой или холмистой местности, когда объекты расположены не на одной плоскости.
Пространственно-зависимая фокусировка необходима также при формировании радиолокационного изображения целей при их изгибе, вибрациях и других движениях объекта как нежесткого тела. Примерами таких целей являются изгиб поезда на криволинейном участке пути, вибрации крыльев самолета в полете или на рулежной дорожке, изгибы и колебания конструкции корабля при волнении моря. Эти ситуации также приводят к расфокусировке изображения и требуют применения дополнительных мер.
Источниками пространственно-зависимых фазовых ошибок являются также ограничения и аппроксимации алгоритмов формирования изображений. Такие ошибки являются детерминированными, однако они не устраняются в процессе обычной обработки траекторных сигналов.
В качестве измеряемого параметра РЛИ или траекторного сигнала, обусловленного наличием фазовых нестабильностей, кроме сдвига СДЧ или РЛИ, используют также другие характеристики. Так, для сосредоточенных целей, например корабль на фоне моря, эффективным критерием компенсации траекторных нестабильностей является контраст РЛИ корабля либо выбранная функция контраста. При этом компенсируются не только траекторные нестабильности носителя, но и движения самой цели.
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
Алгоритм автофокусировки радиолокационного изображения на основе оценки средней доплеровской частоты. Квадратичные фазовые искажения траекторного сигнала влияют в основном на расфокусировку РЛИ, что приводит к ухудшению разрешающей способности РСА и проявляется в снижении резкости изображения и понижении контрастности РЛИ (уменьшении максимума изображения точечного объекта и увеличении уровня боковых лепестков).
 использует траекторный сигнал от всех объектов и фона местности в диаграмме направленности антенны. Изменение СДЧ приводит к смещению выходного сигнала изображения, которое оценивается по сдвигу максимума спектра траекторного сигнала (рис. 6.20). использует траекторный сигнал от всех объектов и фона местности в диаграмме направленности антенны. Изменение СДЧ приводит к смещению выходного сигнала изображения, которое оценивается по сдвигу максимума спектра траекторного сигнала (рис. 6.20).
Для измерения СДЧ вся синтезированная апертура разбивается на несколько подапертур, на которых допустима линейная аппроксимация движения ФЦА. Использование двух подапертур позволяет оценить квадратичный коэффициент фазовой ошибки, трех подапертур - кубический и т.д.




 где где
 - коэффициент квадратичной фазовой ошибки. - коэффициент квадратичной фазовой ошибки.
 описывается выражениями: описывается выражениями:
 в выражениях (6.48) и (6.49) определяет сред- в выражениях (6.48) и (6.49) определяет сред-
 которые является РЛИ, можно которые является РЛИ, можно
описать выражениями:
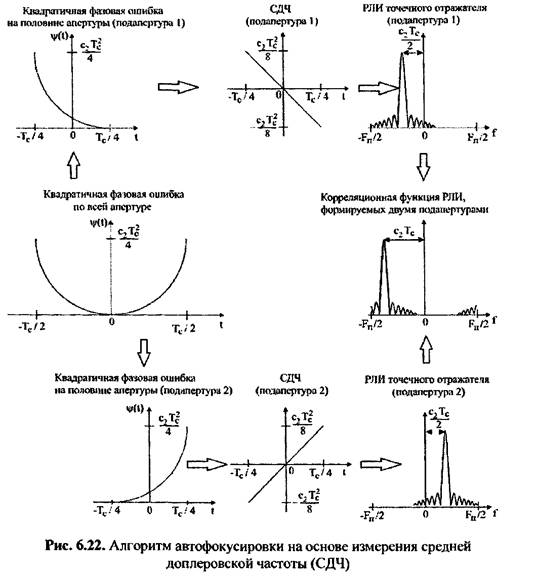
 Д ля оценки этого смещения применимы различные методы. Обычный метод оценки состоит в том, чтобы измерить положение пика взаимной корреляции двух изображений, полученных двумя подапертурами. Д ля оценки этого смещения применимы различные методы. Обычный метод оценки состоит в том, чтобы измерить положение пика взаимной корреляции двух изображений, полученных двумя подапертурами.



Вычисление средней доплеровской частоты за определенный интервал наблюдения (траектории) приводит к сужению полосы частот измеряемых нестабильностей. Поэтому такой метод позволяет компенсировать только медленные нестабильности. Кроме того, большие ошибки в измерение СДЧ вносят изменения ЭПР отражающей поверхности по азимуту. Для уменьшения этих ошибок усредняются значения СДЧ, измеренные в нескольких каналах дальности.
 на более чем две подапертуры. В общем случае использование N подапертур достаточно для оценки коэффициентов разложения функции фазовой ошибки N-го порядка. на более чем две подапертуры. В общем случае использование N подапертур достаточно для оценки коэффициентов разложения функции фазовой ошибки N-го порядка.
Функцию фазовой ошибки можно представить в виде полинома N-й степени:

 - неизвестные коэффициенты разложения функции фазовой ошибки. - неизвестные коэффициенты разложения функции фазовой ошибки.
В выражении (6.55) учтено, что постоянный и линейный члены полинома не влияют на фокусировку радиолокационного изображения.
В качестве математической модели траекторного сигнала при наличии траекторных нестабильностей по-прежнему используется модель (6.47).
 приводит к тому, что фазовая ошибка в i-й подапертуре описывается выражением: приводит к тому, что фазовая ошибка в i-й подапертуре описывается выражением:
Из выражения (6.56) следует, что средняя доплеровская частота в i-й подапертуре пропорциональна коэффициентам разложения и определяется выражением:

Наличие средней доплеровской частоты вызывает сдвиг изображения, формируемого i-й подапертурой. Относительный сдвиг между изображениями, сформированными i-й и j-й подапертурами, определяется выражениями:


Выражение (6.59) описывает переопределенную систему линейных уравнений. В матричном виде эту систему уравнений можно представить как:

 - вектор-столбец коэффициента - вектор-столбец коэффициента
разложения функции фазовой ошибки и матрица связи между коэффициентами разложения фазовой ошибки и сдвигами между апертурами. Элементы матрицы К определяются выражением:

Уравнения (6.59) и (6.60) имеют N(N-1)72 входных значений, так как существуют N(N-1)72 пар подапертур. Для нахождения коэффициентов фазовой ошибки необходимо решить переопределенную систему (6.60). Решение этой системы в матричном виде имеет вид:
После вычисления взаимной корреляции всех пар изображений и оценки относительных сдвигов между ними коэффициенты фазовой ошибки вычисляются путем перемножения соответствующих матриц. Избыточность, содержащаяся в выражении (6,60), снижает влияние шумов и флуктуации амплитуды целей при переходе от одной подапертуры к другой.
Преимущество рассмотренного способа оценки фазовых нестабильностей состоит в отсутствии ограничений на вид отражающей поверхности: появление сигнала от точечного объекта улучшает оценку параметров, а его отсутствие не вызывает срыва фокусировки. Кроме того, такой способ автофокусировки прост в реализации и нетребователен к производительности вычислительной системы.
Недостатком такого алгоритма автофокусировки является то, что с увеличением количества не перекрывающихся подапертур уменьшается их длительность. Уменьшение длительности подапертур вызывает ухудшение разрешения и отношения сигнал/шум целей в изображении. Эти эффекты снижают точность оценки сдвига между подапертурами. На практике алгоритм автофокусировки на основе оценки средней доплеровской частоты можно применять для оценки фазовой ошибки максимум пятого порядка.
При наличии больших фазовых ошибок отклики целей имеют значительную протяженность по азимуту. Это приводит к тому, что относительный сдвиг между изображениями, формируемыми различными подапертурами, вычисляется с большой ошибкой. Следствием этих ошибок является неточная оценка коэффициента разложения функции фазовой ошибки, и, следовательно, фокусировка выполняется не полностью. Решить эту проблему можно, если примененить алгоритм автофокусировки последовательно несколько раз. Как правило, трех-четырех итерации достаточно, чтобы осуществить полную фокусировку радиолокационного изображения.
|

