РадиоведениеСелекция движущихся целей в РСА путем доплеровской фильтрации сигналов
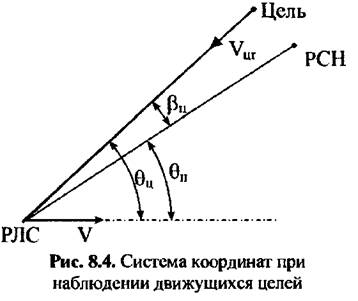
При использовании однолучевой диаграммы направленности (ДН) антенны РСА (один фазовый центр антенны) отличие сигналов движущихся и неподвижных объектов проявляется в различной зависимости средней доплеровской частоты траекторного сигнала от углового положения объекта.
Сигнал неподвижного объекта (рис. 8.4) имеет доплеровскую частоту

 - длина волны РСА. - длина волны РСА.
 (в пределах ширины ДН антенны) (в пределах ширины ДН антенны)
 ). ).
 будем полагать скомпенсированной (равной нулю). Тогда будем полагать скомпенсированной (равной нулю). Тогда

 - тангенциальная скорость носителя. - тангенциальная скорость носителя.
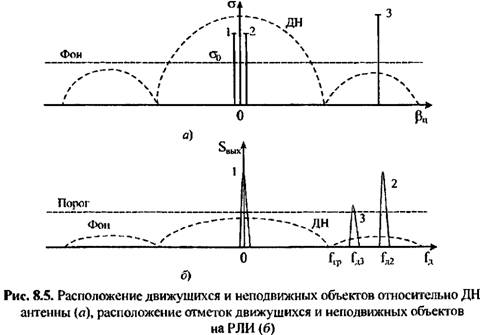
 объект 1 - неподвижен, а объект 2 - движется. Имеется объект 1 - неподвижен, а объект 2 - движется. Имеется


где знак + соответствует направлению движения объекта к РСА.
Таким образом, сигналы движущихся объектов, принимаемые по основному лепестку ДН антенны вместе с сигналами неподвижных объектов, будут отличаться по доплеровским частотам и могут быть отфильтрованы (селектированы) в системе обработки траекторных сигналов.
Сигналы фона и неподвижных объектов, принимаемые по основному лепестку ДН, занимают полосу частот (на уровне -3 дБ)

 - ширина ДН антенны. - ширина ДН антенны.
 - постоянный коэффициент (порог селекции). - постоянный коэффициент (порог селекции).
 - объект неподвижен. - объект неподвижен.
 , эти неподвижные объекты будут считаться движущимися (объект 3 на рис. 8.5). , эти неподвижные объекты будут считаться движущимися (объект 3 на рис. 8.5).
В свою очередь, движущиеся объекты в случае малых радиальных
 будут считаться неподвижными. будут считаться неподвижными.
При этом сигнал движущегося объекта попадает в частотную область сигналов фона и его обнаружение зависит от отношения сигнал/фон.
Эффективность селекции движущихся целей в такой системе существенно зависит от их углового положения относительно максимума ДН антенны.


 и цель будет классифицироваться правильно и цель будет классифицироваться правильно
 , и цель будет считаться неподвижной, В то же время цель 3, находящаяся на левом краю ДН и движущаяся также с удалением, будет классифицироваться правильно, а движущаяся от носителя - неправильно. , и цель будет считаться неподвижной, В то же время цель 3, находящаяся на левом краю ДН и движущаяся также с удалением, будет классифицироваться правильно, а движущаяся от носителя - неправильно.
В связи с этим такая система СДЦ обычно дополняется логическим алгоритмом выделения движущихся целей при сканировании ДН антенны.
Еще одним существенным недостатком системы СДЦ является неопределенность угловое положение - радиальная скорость движущегося объекта. Взаимное положение по азимуту объектов в РЛИ определяется доплеровскими частотами их сигналов:

Поэтому отметка движущегося объекта в изображении будет значительно смещена по азимуту относительно истинного положения:

Такая простая система СДЦ используется для выделения движущихся объектов с большой радиальной скоростью (более 7... 10 м/с). Учитывая небольшие собственные скорости наземных объектов, а также возможность их наблюдения под различными ракурсами, необходимо обеспечивать селекцию объектов, движущихся с радиальными скоростями 1,0..1,5 м/с .
 Задача СДЦ сводится к определению радиальной скорости цели, для чего необходимо измерить направление прихода обнаруженного сигнала (азимут цели). Имея оценки азимута и доплеровской частоты обнаруженного сигнала (8.7) и (8.8), можно определить радиальную скорость цели: Задача СДЦ сводится к определению радиальной скорости цели, для чего необходимо измерить направление прихода обнаруженного сигнала (азимут цели). Имея оценки азимута и доплеровской частоты обнаруженного сигнала (8.7) и (8.8), можно определить радиальную скорость цели:
 . Порог выбирается из условия . Порог выбирается из условия

 можно использовать сканирование однолучевой ДН антенны либо моноимпульсную антенную систему. Синтезирование апертуры в суммарном канале обеспечивает одновременное формирование РЛИ неподвижных и движущихся целей, фона и измерение доплеровской частоты сигналов целей. Разностный канал обеспечивает измерение азимутальных углов обнаруженных целей. Оценки радиальных скоростей и углов позволяют селектировать движущиеся цели и устанавливать их отметки на РЛИ в истинное положение по азимуту. можно использовать сканирование однолучевой ДН антенны либо моноимпульсную антенную систему. Синтезирование апертуры в суммарном канале обеспечивает одновременное формирование РЛИ неподвижных и движущихся целей, фона и измерение доплеровской частоты сигналов целей. Разностный канал обеспечивает измерение азимутальных углов обнаруженных целей. Оценки радиальных скоростей и углов позволяют селектировать движущиеся цели и устанавливать их отметки на РЛИ в истинное положение по азимуту.
Если значение отношения сигнал/фон недостаточно для эффективного обнаружения движущейся цели, необходимо использовать системы СДЦ с пространственным подавлением сигналов фона и неподвижных целей.
|

