РадиоведениеСелекция целей по тангенциальной скорости
Существующие методы СДЦ, которые оценивают только радиальную составляющую скорости объекта, позволяют выделить не более 60% движущихся наземных объектов военной техники. Введение режима СДЦ по тангенциальной скорости позволяет селектировать до 80...90% таких объектов.
Основой режима СДЦ по тангенциальной скорости является формирование динамического фазового портрета объектов. Динамический фазовый портрет — это РЛИ, получаемое с высокой пространственной разрешающей способностью, интенсивность каждой точки которого пропорциональна разности фаз сигналов двух разнесенных во времени (а также в пространстве и времени) каналах РСА соответствующего разрешаемого участка поверхности.
Динамический фазовый портрет чувствителен к изменению фазы функции отражения во времени. Это изменение может быть обусловлено движением отражающей поверхности либо изменением ее свойств.
Изменение фазы функции отражения приводит к изменению параметров траекторного сигнала объекта. Так как в данном случае нас интересуют объекты, движущиеся с малой скоростью, то можно считать, что за время синтезирования амплитуда отраженного сигнала постоянна




 , - амплитуда и начальная фаза отраженного от цели сигнала; , - амплитуда и начальная фаза отраженного от цели сигнала;
 - волновое число; г (1) - закон изменения расстояния РСА - цель. - волновое число; г (1) - закон изменения расстояния РСА - цель.
Закон изменения расстояния РСА - цель для случая бокового обзора можно представить в виде

 - расстояние от РЛС до центра кадра синтезирования в момент времени t = 0. - расстояние от РЛС до центра кадра синтезирования в момент времени t = 0.
В случае необходимости формирования радиолокационного изображения с разрешениями лучшими, чем 1 м, необходимо учитывать не только квадратичные члены, но и коэффициенты разложения более высокого порядка (третьего, четвертого). Однако следует отметить, что при решении задач селекции движущихся целей такое высокое разрешение как правило не требуется.
После компенсации квадратичного фазового набега, обусловленного собственным движением РСА (умножения на опорную функцию
 описывается выражением вида описывается выражением вида
 - начальная фаза сигнала, определяемая расстоянием до цели Кц и свойствами функции отражения цели. - начальная фаза сигнала, определяемая расстоянием до цели Кц и свойствами функции отражения цели.
 выражение (8.26) можно представить в виде выражение (8.26) можно представить в виде



 - комплексная функция отражения фона в элементе дальности; - комплексная функция отражения фона в элементе дальности;
 — расстояние от отражателя до фазового центра антенны. — расстояние от отражателя до фазового центра антенны.





При однородной местности в районе цели математические модели квадратурных составляющих сигнала фона можно представить в виде гауссовского белого шума:

Такая же модель соответствует внутреннему шуму приемника РСА. Полагаем, что мощность шума много меньше мощности фона. В этом случае траекторный сигнал на входе системы обработки представляет собой аддитивную смесь сигнала, отраженного от точечной цели, и белого гауссовского шума, обусловленного отражением сигнала от подстилающей поверхности:




 зависит не только от параметров движения цели, но и от начальной фазы цели. Следовательно, для решения задачи необходимо введение дополнительного канала синтезирования. В роли дополнительного канала может выступать выходной сигнал, сформированный другой, смещенной по траектории, апертурой или апертурой другой длительности, зависит не только от параметров движения цели, но и от начальной фазы цели. Следовательно, для решения задачи необходимо введение дополнительного канала синтезирования. В роли дополнительного канала может выступать выходной сигнал, сформированный другой, смещенной по траектории, апертурой или апертурой другой длительности,
 имеют вид: имеют вид:
 описывается выражением описывается выражением

 описывается выражением описывается выражением
 - вектор сигнала на входе двухканальной - вектор сигнала на входе двухканальной
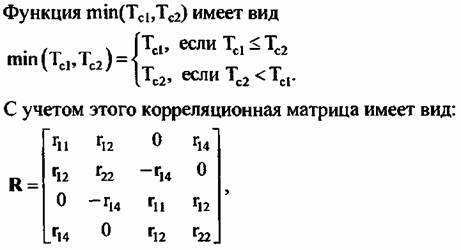
системы обработки системы обработки; к - корреляционная матрица квадратурных составляющих; m - вектор математических ожидании входных сигналов;

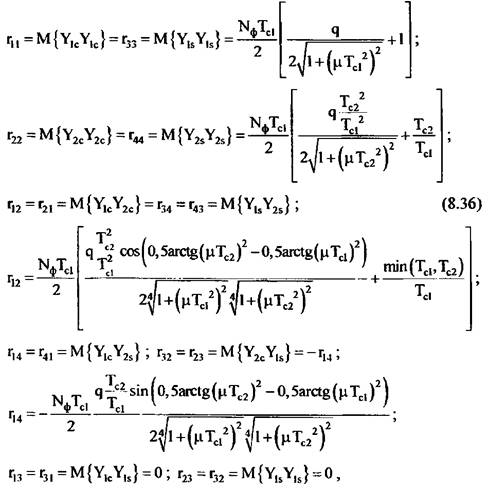
Корреляционная матрица К квадратурных составляющих имеет вид
Запишем выражения для корреляционной и взаимокорреляционной функций квадратурных составляющих сигналов:
 - отношение сигнал/фон после когерентного накопления первой апертурой. - отношение сигнал/фон после когерентного накопления первой апертурой.
 ) показывает, во сколько раз отношение сигнал/фон после когерентного накопления второй апертурой больше отношения сигнал/фон после когерентного накопления первой апертурой. ) показывает, во сколько раз отношение сигнал/фон после когерентного накопления второй апертурой больше отношения сигнал/фон после когерентного накопления первой апертурой.

Тогда
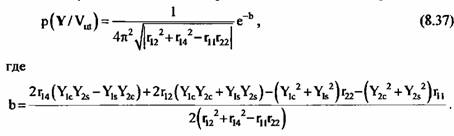
условная плотность вероятности описывается выражением:

 - нормирующий коэффициент. - нормирующий коэффициент.

 в виде в виде
Условную плотность вероятности (8.37) в этом случае можно представить в виде
разница фаз между сигналами, сформированными двумя апертурами.
 описываются выражениями описываются выражениями

Максимум апостериорной вероятности будет наблюдаться при выполнении условия:

 , уравнение (8.40) , уравнение (8.40)
имеет вид

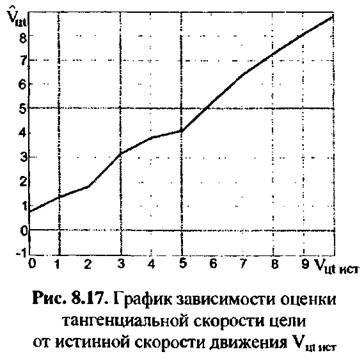
Тогда оценка тангенциальной скорости находится с помощью выражения:

 - оценка разности фаз выходных сигналов, формируемых двумя каналами. - оценка разности фаз выходных сигналов, формируемых двумя каналами.
 принимается решение о том, что цель движется. принимается решение о том, что цель движется.
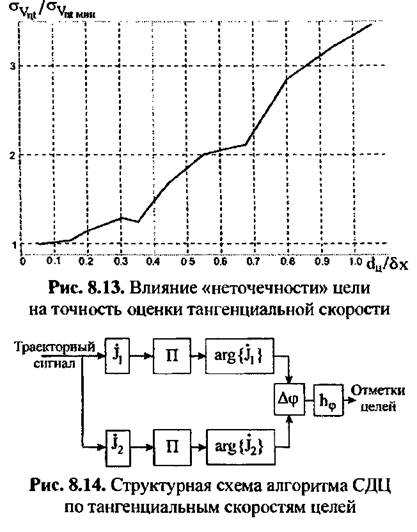
 определяется траекторными нестабильностями носителя РСА, мощностью внутренних шумов приемника и фона местности, нестабильностью функции отражения объекта, а также случайным изменением фазы сигнала при смене интервала синтезирования (неточечностью цели). определяется траекторными нестабильностями носителя РСА, мощностью внутренних шумов приемника и фона местности, нестабильностью функции отражения объекта, а также случайным изменением фазы сигнала при смене интервала синтезирования (неточечностью цели).
Анализ выражения (8.42) показывает, что для повышения точности оценки тангенциальной скорости цели необходимо увеличивать разницу в интервалах накопления траекторного сигнала первой и второй апертурами. А именно, длительность накопления траекторного сигнала первой апертуры должна быть минимальной, а второй- максимальной.
При этом следует учитывать, что максимальное время синтезирования ограничено траекторными нестабильностями, диаграммой направленности антенны, видом обзора земной поверхности и многими другими факторами. Минимальное время синтезирования в свою очередь ограничивается необходимостью обнаруживать цель с заданной вероятностью; кроме того, при уменьшении интервала синтезирования резко возрастают фазовые шумы. Получение аналитической зависимости точности оценки тангенциальной скорости цели с учетом этих, а также многих других факторов затруднен. Поэтому определение точности оценки тангенциальной скорости цели обычно проводится методом имитационного моделирования.
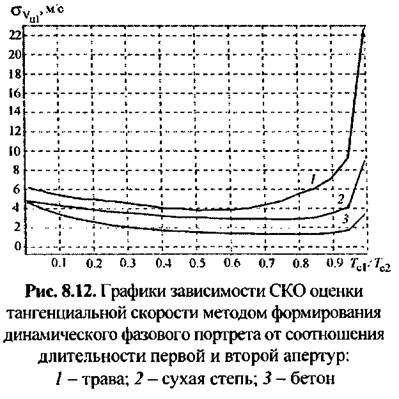
 падает отношение сигнал/фон в сигнале, формируемом второй апертурой, и СКО оценки начинает увеличиваться. падает отношение сигнал/фон в сигнале, формируемом второй апертурой, и СКО оценки начинает увеличиваться.
 - -
 увеличивается увеличивается
более чем в 3 раза по сравнению с СКО точечной цели.
Структурная схема алгоритма представлена на рис. 8.14. Алгоритм селекции движущихся целей по их тангенциальным скоростям заключается:
 ; ;
обнаружении сигналов целей на фоне отражений от подстилающей поверхности (пороговая обработка по амплитуде П);
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
 сигналов обнаруженных целей; сигналов обнаруженных целей;
 принимается решение, что цель движется. принимается решение, что цель движется.
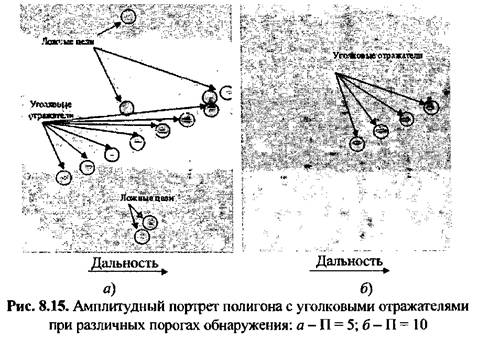
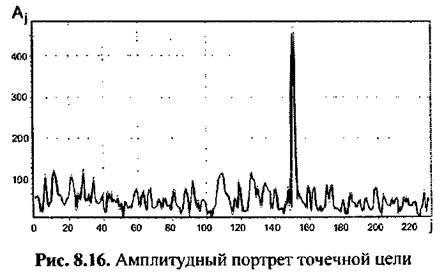
Работоспособность алгоритма оценки тангенциальной скорости методом формирования динамического фазового портрета показана далее на примере использования записей сигналов РСА, полученных в условиях реального полета. Амплитудный портрет полигона с уголковыми отражателями представлен на рис. 8.15. Для обнаружения целей используется факт превышения сигнала в элементе разрешения над средним уровнем сигнала фона в заданное пороговое количество раз (П). На рис. 8.15,а и б показаны обнаруженные цели при П =5 и П=10 соответственно. Результаты измерения тангенциальной скорости обнаруженных отражателей в соответствии с алгоритмом (8.42) показывают, что все отражатели имеют тангенциальную скорость, близкую к нулю.

|

