РадиоведениеФункция неопределенности траекторного сигнала РЛС планового обзора
 расположенной поперек линии пути. Амплитуда расположенной поперек линии пути. Амплитуда
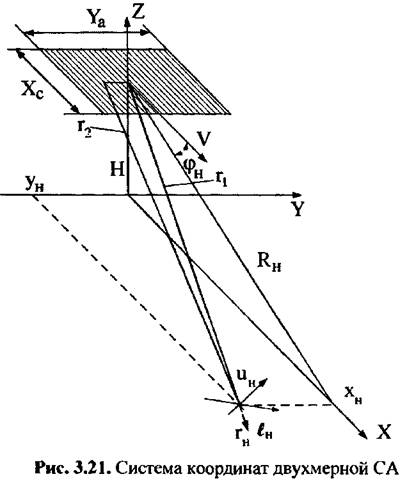
 (рис. 3.21). На выходе системы обработки получается двухмерный сигнал, амплитуда и фаза которого соответствуют амплитуде и фазе коэффициента отражения соответствующего участка зоны обзора, т.е. изображению местности и объектов в зоне обзора. (рис. 3.21). На выходе системы обработки получается двухмерный сигнал, амплитуда и фаза которого соответствуют амплитуде и фазе коэффициента отражения соответствующего участка зоны обзора, т.е. изображению местности и объектов в зоне обзора.
Характеристики разрешения определяются функцией неопределенности

 - траекторный сигнал на входе системы обработки. Для точечного объекта - траекторный сигнал на входе системы обработки. Для точечного объекта

 Расстояние Расстояние


 и обратно, до произвольного приемного элемента, определяется формулой: и обратно, до произвольного приемного элемента, определяется формулой:
 при смещении координат объекта при смещении координат объекта

 К роме того, заменим К роме того, заменим
 функцию неопределенности в координатах дальность - азимут - угол места. функцию неопределенности в координатах дальность - азимут - угол места.
Для упрощения расчетов ДН антенны и весовую функцию обработки зададим в виде

При введении такой функции допустимо без больших ошибок брать интеграл (3.19) в бесконечных пределах.
Разлагая выражение (3.20) в ряд и пренебрегая членами 2-го порядка малости, можно с учетом сделанных выше замечаний представить интеграл (3.19) в виде
 ) )
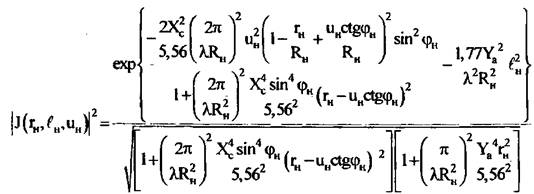
Квадрат модуля интеграла (3.21), нормированный по своему максимальному значению, равен
 а по а по
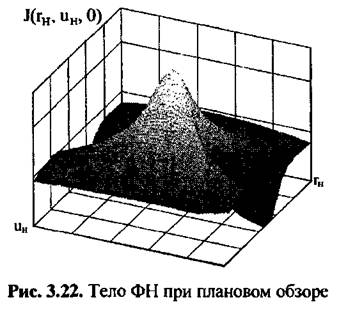
 Вид функции неопределенности в координатах дальность - угол места, построенной по (3.22), изображен на рис. 3. 22. Вид функции неопределенности в координатах дальность - угол места, построенной по (3.22), изображен на рис. 3. 22.
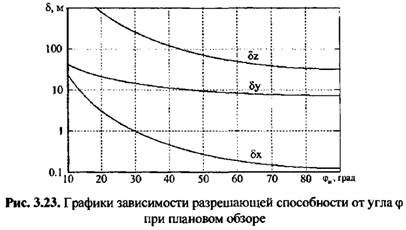
Оценивая разрешающую способность как ширину функции неопределенности вдоль соответствующей координаты на уровне 0,7, получили

 из которых из которых
видно, что РЛС планового обзора обладает высокой разрешающей способностью по всем координатам в зоне обзора непосредственно под ЛА.
|

