Теория систем автоматического управленияУправляемость и наблюдаемость
 . Очевидно, чтобы осуществить такой перевод, управляющее воздействие должно прямо или косвенно влиять па все переменные состояния. . Очевидно, чтобы осуществить такой перевод, управляющее воздействие должно прямо или косвенно влиять па все переменные состояния.
 косвенно тоже оказываются управляемыми. Однако, как отмечалось выше, нормальная форма существует только при отсутствии в правой части дифференциального уравнения (5.70) производных от и и/. косвенно тоже оказываются управляемыми. Однако, как отмечалось выше, нормальная форма существует только при отсутствии в правой части дифференциального уравнения (5.70) производных от и и/.
 будет изменяться по закону будет изменяться по закону

 значение значение

в общем случае отличающееся от требуемого значения.
 диагональная, условия полной управляемости получаются столь же просто, как и при канонической форме. В противном случае можно попытаться произвести диагоиализацию следующим образом. диагональная, условия полной управляемости получаются столь же просто, как и при канонической форме. В противном случае можно попытаться произвести диагоиализацию следующим образом.
Положим, что существует невырожденная матрица 5 порядка п такая, что

 — собственный вектор. — собственный вектор.
Тогда уравнения (5.73) и (574) принимают вид


 будет диагональной. Собственные векторы определяются из уравнений будет диагональной. Собственные векторы определяются из уравнений

Однако диагонализания представляет собой трудоемкую операцию и возможна не всегда. Гораздо удобнее использовать предложенный Р. Калмаиом критерий управляемости. Применительно к одномерному объекту он гласит, что объект полностью управляемый, если матрица

является невырожденной, т. е. если ее ранг равен п.
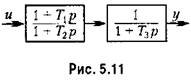
На рис. 5.11 в качестве примера изображена структурная схема объекта. Ей соответствует дифференциальное уравнение (5.70)

В правой части этого уравнения есть производная от и. Поэтому нормальная форма уравнений состояния не существует. При использовании канонической формы уравнения (5.83) и (5.84) принимают вид:
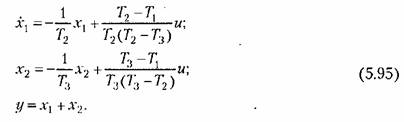
Соответствующая им схема изображена на рис. 5.12, а.
 станет неуправляемой (рис. 5.12, б). станет неуправляемой (рис. 5.12, б).
 означает, что порядок означает, что порядок
 не исчезает, а изменяется не исчезает, а изменяется
по закону (5.91), участвуя в формировании управляемой неличины так, как показано на рис. 5.12, б. Следовательно, и порядок объекта остается прежним.
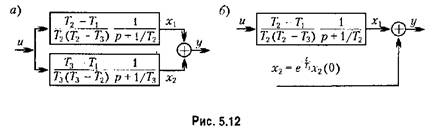
Выбор переменных состояния в виде (5.82) и (5.84) не является единственно возможным. Например, вместо выражения (5.81) можно использовать следующее:
 ) )
где с — постоянные коэффициенты.
Тогда вместо (5.83) и (5.84) получим:

 для рассматриваемого приме- для рассматриваемого приме-

не участвует в формировании управляемой величины у (рис. 5.13, б), т. е. не наблюдается на выходе объекта.
 в уравнениях (5.72) или (5.98) отличны от нуля. В общем случае объект является полностью наблюдаемым, если матрица Калмана в уравнениях (5.72) или (5.98) отличны от нуля. В общем случае объект является полностью наблюдаемым, если матрица Калмана

является невырожденной.
 невозможно. Однако он позволяет сделать вывод о том, что управляемость и наблюдаемость — это свойство не самого объекта (или системы), а его математической модели в виде уравнений состояния. При одном выборе переменных состояния обеспечивается полная управляемость, а при другом — полная наблюдаемость. Эти проблемы не возникают, если модель объекта представлена дифференциальным уравнением (5.70). невозможно. Однако он позволяет сделать вывод о том, что управляемость и наблюдаемость — это свойство не самого объекта (или системы), а его математической модели в виде уравнений состояния. При одном выборе переменных состояния обеспечивается полная управляемость, а при другом — полная наблюдаемость. Эти проблемы не возникают, если модель объекта представлена дифференциальным уравнением (5.70).
Понятия управляемости и наблюдаемости важны, например, тогда, когда алгоритм управления формируется не в зависимости от ошибки системы (см. гл.2), а в функции переменных состояния;

Однако в изложенном выше смысле они не всегда совпадают с практическими представлениями. Даже если какая-либо неременная состояния и может быть вычислена по доступным для измерения выходным величинам, обработка этих величин, особенно при наличии помех, может быть сложной. Поэтому практически наблюдаемыми переменными обычно считаются те из них, которые могут быть непосредственно измерены теми или иными датчиками.
|

