Теория систем автоматического управленияПараллельные корректирующие звенья
Как уже отмечалось, параллельные корректирующие звенья удобно применять при использовании сложных алгоритмов управления, когда наряду с основным сигналом вводятся его производные или интегралы.
Введение интегралов преследует цель снижения установившейся ошибки. Этот вопрос был рассмотрен в главе 9 в связи с повышением точности систем автоматического управления посредством использования изодромных устройств.
Введение производных преследует обычно цель обеспечения устойчивости. В этом случае используются звенья дифференцирующего типа, включаемые параллельно основной цепи.
Варианты параллельного включения дифференцирующих звеньев показаны на рис. 10.6. Получение производной второго порядка при помощи одного звена является затруднительным. Поэтому схема, изображенная па рис. 10.6, б используется
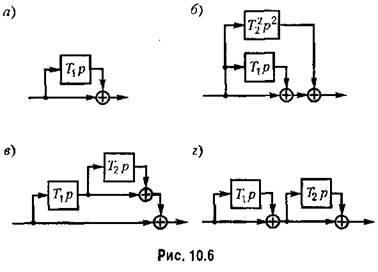
редко. Введение второй производной дополнительно к первой производной осуществляется обычно по каскадным схемам, изображенным на рис. 10.6, в и 10.6, г. Для первой из них (рис. 10.6, в) результирующая передаточная функция будет

а для второй (рис. 10.6, г) —

На рис 10.6 дифференциаторы изображены идеальными. Более вероятно, что они будут представлять собой дифференцирующие звенья с замедлением (рис. 4/24).
Заметим, что введение параллельных корректирующих звеньев, представляющих собой интеграторы соответствует поднятию нижних частот. Это хороню видно ла рис. 9.6. Введение параллельных корректирующих звеньев, представляющих собой дифференциаторы, соответствует поднятию верхних частот. Это можно видеть из формул (10.18) и (10.19).
 — дифференцирующим трансформатором, на вход которого поступает напряжение та-хогенератора. — дифференцирующим трансформатором, на вход которого поступает напряжение та-хогенератора.
 — коэффициент — коэффициент
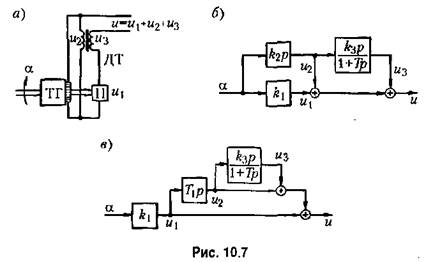
 - коэффициент передачи и постоянная времени дифференцирующего трансформатора. - коэффициент передачи и постоянная времени дифференцирующего трансформатора.
Результирующая передаточная функция

 : :
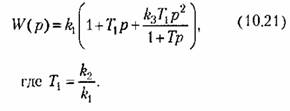
 определит результирующую передаточную функцию определит результирующую передаточную функцию
Этой передаточной функции соответствует структурная схема 10.6, а,
|

