Теория систем автоматического управленияОбратные связи
Как уже отмечалось выше, обратные связи (см. рис. 10.1, в) могут быть положительными и отрицательными. Кроме того, обратные связи могут быть жесткими и гибкими. Для уяснения последнего рассмотрим передаточную функцию (10-3), записанную для случая отрицательной обратной связи. Из этого выражения найдем передаточную функцию для установившегося режима, для чего в (10.3) необходимо положить р = 0:


 Это означает, что в этом режиме передаточная функция цени, охваченной обратной связью, будет равна передаточной функции исходной цепи. Такая обратная связь называется гибкой. Нетрудно видеть, что гибкая обратная связь действует только в переходных режимах, а в установившемся режиме она как бы отключается. Это означает, что в этом режиме передаточная функция цени, охваченной обратной связью, будет равна передаточной функции исходной цепи. Такая обратная связь называется гибкой. Нетрудно видеть, что гибкая обратная связь действует только в переходных режимах, а в установившемся режиме она как бы отключается.
 то обратная связь действует не только в переходном, но и в установившемся режиме. В этом случае обратная связь называется жесткой. то обратная связь действует не только в переходном, но и в установившемся режиме. В этом случае обратная связь называется жесткой.
 так же, как и передаточная функция исходной цени. Заметим также, что понятие гибкой или жесткой обратной связи связано с той величиной, которая принимается в качестве выходной в исходном звене. Так, например, обратная связь может быть гибкой но отношению к углу поворота вала двигателя и жесткой по отношению к скорости его вращения, которая является первой производной от угла поворота. так же, как и передаточная функция исходной цени. Заметим также, что понятие гибкой или жесткой обратной связи связано с той величиной, которая принимается в качестве выходной в исходном звене. Так, например, обратная связь может быть гибкой но отношению к углу поворота вала двигателя и жесткой по отношению к скорости его вращения, которая является первой производной от угла поворота.
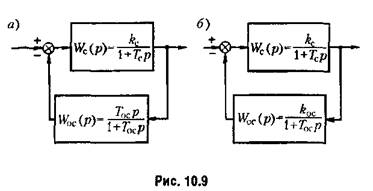
На рис. 10.9, а и 10.9, б изображены примеры гибкой и жесткой отрицательных обратных связей. Обратной связью замыкается апериодическое звено с передаточной функцией

В нервом случае (рис. 10.9, а) обратная связь представляет собой дифференцирующее звено с замедлением (например, дифференцирующий конденсатор) с передаточной функцией

 , так же, как и в исходном апериодическом звене. Таким образом, эта обратная связь является гибкой. Наличие дифференцирующего элемента в цепи обратной связи и привело к получению гибкой обратной связи. , так же, как и в исходном апериодическом звене. Таким образом, эта обратная связь является гибкой. Наличие дифференцирующего элемента в цепи обратной связи и привело к получению гибкой обратной связи.
Во втором случае (рис. 10.9, б) обратная связь представляет собой апериодическое звено с передаточной функцией

Результирующая передаточная функция
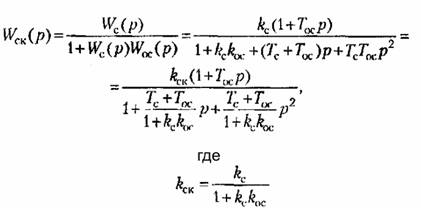
представляет собой новое значение коэффициента передачи звена, замкнутого обратной связью.
В рассмотренном случае обратная связь является жесткой, так как она изменяет коэффициент передачи звена в установившемся состоянии.
 . В результате для апериодического звена, замкнутою такой отрицательной обратной связью, получим . В результате для апериодического звена, замкнутою такой отрицательной обратной связью, получим

 представляет собой коэффициент передачи по петле обратной связи. представляет собой коэффициент передачи по петле обратной связи.
 раз. При решении этой же задачи посредством использования жесткой обратной связи, охватывающей сразу оба звена, получится снижение результирующего коэффициента передачи только в п раз. Задача снижения суммы постоянных времени звеньев, входящих в систему управления, встречается в практике довольно часто. Это делает применение обратных связей обычно более предпочтительным. раз. При решении этой же задачи посредством использования жесткой обратной связи, охватывающей сразу оба звена, получится снижение результирующего коэффициента передачи только в п раз. Задача снижения суммы постоянных времени звеньев, входящих в систему управления, встречается в практике довольно часто. Это делает применение обратных связей обычно более предпочтительным.
В динамическом отношении отрицательные обратные связи могут оказывать самое различное действие. Однако, подобно тому как это было сделано для последовательных корректирующих устройств, можно наметить три основных вида отрицательных обратных связей:
обратные связи, подавляющие высокие частоты (аналоги пассивного последовательного интегрирующего звена);
обратные связи, подавляющие низкие частоты (аналоги пассивного последовательного дифференцирующего звена);
обратные связи, подавляющие средние частоты (аналоги пассивного последовательного интегро-дифферепцирующегозвепа).
Установить аналогию обратной связи с тем или иным последовательным корректирующим звеном можно при помощи формул перехода (10.5) и (10.6). Особенно важно иметь возможность перехода от последовательного корректирующего звена к эквивалентной обратной связи. Это определяется тем, что расчетным путем наиболее просто определить параметры последовательного корректирующего звена, а с точки зрения технического осуществления наиболее удобны обратные связи.

В табл. 10.3 приведены наиболее распространенные случаи перехода от электрических последовательных корректирующих звеньев к электрическим обратным связям. Эта таблица может быть использована также для перехода от последовательных звеньев к обратным связям любого тина (иеэлектрическим), так как она позволяет но передаточной функции последовательного звена определить передаточную функцию эквивалентной отрицательной обратной связи.
Отрицательные обратные связи. Отрицательные корректирующие обратные связи очень часто используются для охвата исполнительных двигателей и серводвигателей (вспомогательных двигателей). В связи с этим рассмотрим наиболее важные случаи.
На рис. 10.10 изображено несколько случаев охвата электродвигателя отрицательной обратной связью. Схема на рис. 10.10, а соответствует использованию линейного потенциометра П, сцепленного через редуктор Р с валом двигателя Д. Напряжение, снимаемое с потенциометра, поступает на вход усилителя, от которого управляется двигатель. Пусть передаточная функция двигателя совместно с усилителем соответствует интегрирующему звену с замедлением:

 — электромеханическая постоянная времени, — электромеханическая постоянная времени,
 равна коэффициент) равна коэффициент)
передачи потенциометра. Результирующая передаточная функция в соответствии с формулой (10,3) будет

 которая которая

Аналогичный результат можно получить, если вместо обратной связи установить па выходном валу пружину, развивающую момент, пропорциональный углу поворота вала,
 — коэффициент передачи тахогене ратора. — коэффициент передачи тахогене ратора.
Результирующая передаточная функция в соответствии с (10.3) будет

 раз коэффициента передачи и постоянной време- раз коэффициента передачи и постоянной време-

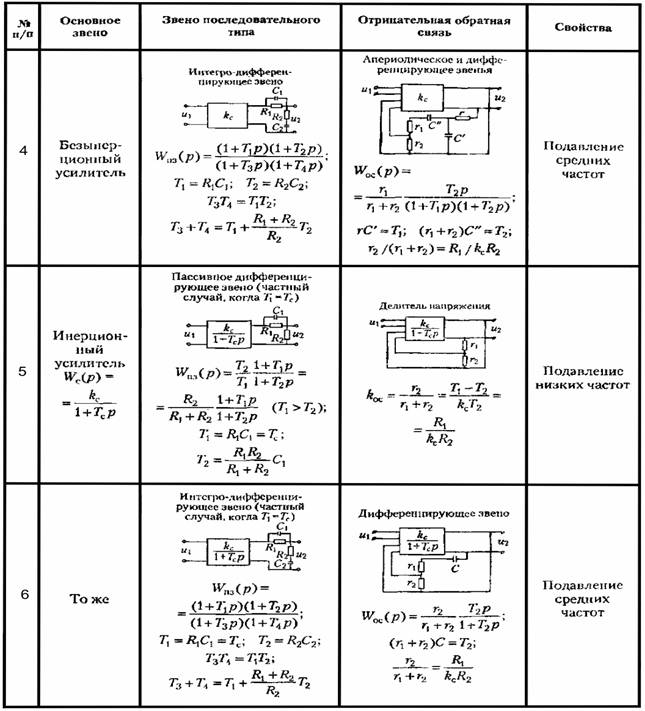


В соответствии с табл. 10.3 (№ 5) этот случай аналогичен включению последовательного пассивного дифференцирующего звена. Аналогичный результат может быть получен при установке па валу двигателя демпфера, развивающего момент сопротивления, пропорциональный скорости вращения (скоростное трение). В этом случае коэффициент передачи и постоянная времени двигателя уменьшатся в одинаковое число раз.
На рис. 10.10, в изображено введение обратной связи по ускорению. В этом случае передаточная функция цепи обратной связи будет

 — коэффициент передачи тахогеиератора. — коэффициент передачи тахогеиератора.
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
Результирующая передаточная функция для этого случая в соответствии с формулой (10.3) будет

В соответствии с табл. 10.3 (№ 6) этот случай аналогичен включению последовательного иитегро-диффереицирующего звена.
Представляет интерес рассмотрение частного случая, когда можно приближенно считать дифференциатор идеальным (рис. 10.10, в). Тогда передаточная функция
 , а. результирующая передаточная функция двигателя совместно с обратной связью примет вид , а. результирующая передаточная функция двигателя совместно с обратной связью примет вид

 — результирующая электромеханическая постоянная времени — результирующая электромеханическая постоянная времени
двигателя.
Из формулы (10.28) видно, что обратная связь по ускорению эквивалентна установке на валу двигателя дополнительного маховика, увеличивающего электромеханическую постоянную времени двигателя.
 соответствует (10.24). Передаточная функция цепи обратной связи соответствует (10.24). Передаточная функция цепи обратной связи

 где а и где а и
Ь - плечи рычага. В результате этот
случай сводится к рассмотренной выше схеме, изображенной на рис. 10.10, а. Результирующая переда точная функция будет совпадать с (10.25).
Рис. 10.11, б соответствует гибкой обратной связи, передаточная функция которой
 — постоянная времени дифференцирующего устройства, состоящего из демпфера и пружины (см. рис. 4.24, г). — постоянная времени дифференцирующего устройства, состоящего из демпфера и пружины (см. рис. 4.24, г).
Результирующая передаточная функция в соответствии с формулой (10,3) будет

 и параметром затухания С- Если частота q достаточно велика, то выражение (10.29) можно приближенно записать в виде и параметром затухания С- Если частота q достаточно велика, то выражение (10.29) можно приближенно записать в виде

Передаточная функция (10.30) совпадает с передаточной функцией изодромного устройства (9.10). В связи с этим гибкую обратную связь, изображенную на рис. 10.24, б, называют иногда изодромпой обратной связью.
Положительные обратные связи. Положительные обратные связи находят значительно меньшее распространение в качестве корректирующих средств но сравнению с отрицательными. Встречается применение положительных обратных связей в качестве так называемых корректоров

 , а в цепи обратной связи , а в цепи обратной связи
установлено апериодическое звено первого порядка с передаточной функцией
 Результирующая передаточная функция в соответствии с (10.3) будет Результирующая передаточная функция в соответствии с (10.3) будет

 формула (10.31) будет соответствовать переда- формула (10.31) будет соответствовать переда-
 затрудняется необходимостью тщательного масштабирования. затрудняется необходимостью тщательного масштабирования.
Положительные обратные связи находят также применение в магнитных усилителях с целью уменьшения постоянных времени последних при сохранении коэффициента усиления по мощности. Это делается следующим образом. Предположим, что усилитель имеет передаточную функцию, соответствующую апериодическому звену,
 — коэффициент усиления (коэффициент передачи) но напряжению. — коэффициент усиления (коэффициент передачи) но напряжению.
 в соответствии с (10.3) имеем результирующую передаточную функцию в соответствии с (10.3) имеем результирующую передаточную функцию

Эта передаточная функция может быть также представлена в следующем виде:
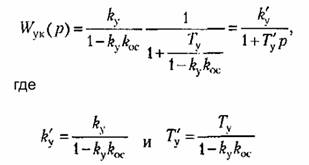
новые значения коэффициента усиления по напряжению и постоянной времени усилителя. Нетрудно видеть, что при помощи жесткой положительной обратной связи можно в одинаковое число раз увеличить коэффициент усиления по напряжению и постоянную времени усилителя.
Коэффициент усиления усилителя по мощности равен отношению выходной и входной мощностей в установившемся режиме:

 — сопротивление нагрузки и входное сопротивление усилителя. — сопротивление нагрузки и входное сопротивление усилителя.
Качество усилителя может характеризоваться отношением коэффициента усиления по мощности к постоянной времени:

 считаются постоянными) считаются постоянными)

 . В результате получаем . В результате получаем

Таким образом, введение положительной обратной связи позволяет увеличить отношение коэффициента усиления по мощности к постоянной времени усилителя. При заданном значении коэффициента усиления по мощности усилитель с положительной обратной связью будет иметь меньшее значение результирующей постоянной времени.
|

