Теория систем автоматического управленияЦифровые системы
Общие сведения
Цифровой системой, как отмечалось в главе 1, называется система автоматического управления, в состав управляющего устройства которой включена цифровая вычислительная машина или специализированное цифровое вычислительное устройство. В дальнейшем будем сокращенно обозначать их как ЦВМ.
Непосредственно в целях управления ЦВМ используется для формирования программ управления (§ 2.1) и цифровой реализации алгоритмов управления (§ 2.2) или корректирующих средств (§ 10.1).
Как правило, целесообразно вводить ЦВМ в систему управления в тех случаях, когда для решения указанных задач требуется сложная обработка информации или выполнение таких операций, которые не могут быть осуществлены с требуемой точностью при помощи аналоговых средств (умножение, деление, преобразование координат и т. и.). Это относится, например, к программам наведения типа (2.8), нелинейным алгоритмам управления, алгоритмам самонастройки и другим.
 .-элементов. Это связано с тем, что характеристики таких элементов изменяются с течением времени и под влиянием внешних факторов, а их надежность сравнительно невысока. .-элементов. Это связано с тем, что характеристики таких элементов изменяются с течением времени и под влиянием внешних факторов, а их надежность сравнительно невысока.
Помимо непосредственного участия в управлении объектом ЦВМ может выполнять такие операции, как контроль состояния элементов и устройств системы, самоконтроль и др.
В общем случае па ЦВМ может возлагаться решение задач с обслуживанием нескольких зависимых или независимых каналов управления с разделением функций управления между ними по времени или по приоритету [93].

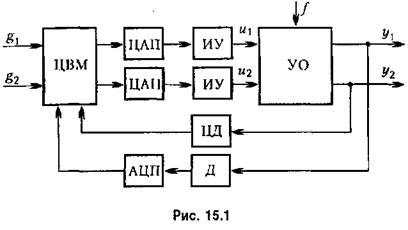
 формируются самой ЦВМ в виде программы управления или вводятся в нее извне. В последнем случае преобразования этих воздействий в цифровые коды осуществляется преобразователями АЦП. Функции сравнивающего устройства, как правило, возлагаются па ЦВМ. Кроме исполнительных устройств в систему могут входить и другие аналоговые устройства, например, усилители, формируются самой ЦВМ в виде программы управления или вводятся в нее извне. В последнем случае преобразования этих воздействий в цифровые коды осуществляется преобразователями АЦП. Функции сравнивающего устройства, как правило, возлагаются па ЦВМ. Кроме исполнительных устройств в систему могут входить и другие аналоговые устройства, например, усилители,
 то то
 зависит от зависит от
сложности алгоритма и быстродействия ЦВМ. К пей добавляется еще и время, затрачиваемое на преобразования в ЦАП и АЦП.
 Значения Значения
т и Т могут быть различными для каждого из каналов.
На основании изложенного, структурную схему одного канала цифровой системы ( при условии независимости этого канала от других) можно представить так, как показано на рис. 15.2. При этом полагается, что ЦВМ реализует линейный алгоритм управления, а суммарное время запаздывания тот несено к непрерывной части системы.

 , осуществляемый АЦП, можно условно представить состоящим из трех операций; квантования по времени, квантования по уровню и кодирования. , осуществляемый АЦП, можно условно представить состоящим из трех операций; квантования по времени, квантования по уровню и кодирования.
 На рис. 15.2 а ту операцию выполняют ключи. На рис. 15.2 а ту операцию выполняют ключи.
 равных частей (квантов). Величина равных частей (квантов). Величина

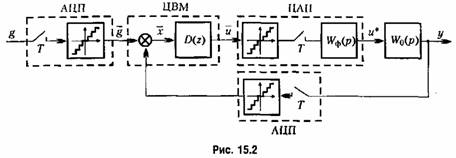
 , На рис. 15.2 это отражено наличием звена с многоступенчатой релейной характеристикой. , На рис. 15.2 это отражено наличием звена с многоступенчатой релейной характеристикой.
 интервалов присваивается определенный двоичный код. Чтобы такое присвоение было однозначным, должно выполняться условие интервалов присваивается определенный двоичный код. Чтобы такое присвоение было однозначным, должно выполняться условие

 — число двоичных разрядов (без учета знакового разряда). Тогда разрешающая способность(15.1) — число двоичных разрядов (без учета знакового разряда). Тогда разрешающая способность(15.1)

 = 10 = 10
 то разрешающая способность такого преобразователя согласно (15.3) 8^ = 0,02 В. Это означает, что нелинейностью АЦП можно пренебречь, заменив нелинейную характеристику линейной. Коэффициент передачи АЦП для линеаризованной характеристики то разрешающая способность такого преобразователя согласно (15.3) 8^ = 0,02 В. Это означает, что нелинейностью АЦП можно пренебречь, заменив нелинейную характеристику линейной. Коэффициент передачи АЦП для линеаризованной характеристики

ЦАП преобразует код й , поступающий с выхода ЦВМ, в аналоговый сигнал и*, обычно представляющий собой электрическое напряжение или ток.
В процессе преобразования каждому значению кода и ставится в соответствие определенное фиксированное (эталонное) значение непрерывного сигнала и, что означает наличие квантования но уровню и отражено на рис. 15,2 в виде многоступенчатой релейной характеристики. Число отличных от нуля разрешенных уровней
 — число разрядов ЦАП. — число разрядов ЦАП.

 , имеющей вид (14.59) или (14.55). , имеющей вид (14.59) или (14.55).

ЦВМ формирует требуемый алгоритм управления или осуществляет дискретную коррекцию в виде вычислительной процедуры, задаваемой линейным разностным уравнением

где неременные и и х представляются в виде цифровых кодов.
 а также предшествующих значений ошибки и управляющего воздействия: а также предшествующих значений ошибки и управляющего воздействия:

Из (15.7) видно, что в программу вычислений входят операции сложения и умножения па постоянные коэффициенты, а также операции запоминания результатов вычисления и значений ошибки на предшествующих шагах.
Применив к левым и правым частям уравнения (15.6) z-преобразование при нулевых начальных условиях (см. 14.3) получим передаточную функцию

которую в дальнейшем будем называть передаточной функцией ЦВМ.
С учетом всех сделанных выше допущений структурную схему цифровой системы (рис, 15.2) можно представить так, как показано па рис. 15.3.
Коэффициенты передачи АЦП и ЦАП, а также запаздывание т здесь отнесены к непрерывной части системы. Погрешности, возникающие в результате замены
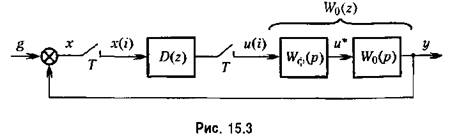
многоступенчатых релейных характеристик линейными в случае необходимости могут быть учтены в виде шумов [28].
 так как она представляла собой передаточную функцию разомкнутой импульсной системы. так как она представляла собой передаточную функцию разомкнутой импульсной системы.
 определяется по формуле (14.62). определяется по формуле (14.62).
Передаточная функция разомкнутой цифровой системы (рис. 15.3)
Модифицированная передаточная функция разомкнутой системы

С учетом (15.9) и (15.10) передаточные функции замкнутой цифровой системы определяются из выражений (14.64), (14.65) и (14.77). Таким образом, па цифровые системы распространяются все методы исследования устойчивости и качества, рассмотренные в главе 14.
|

