Теория систем автоматического управленияКритерий устойчивости Гурвица
Задача отыскания критерия устойчивости для систем, описываемых дифференциальными уравнениями любого порядка, была сформулирована Максвеллом в 1868 году. Эта задача была впервые решена в алгебраической форме Раусом в 1873 году для уравнений четвертой и пятой степени и в 1877 году — полностью.
Поскольку критерий Рауса дан в форме алгоритма, определяющего последовательность математических операций, необходимых для решения задачи, использование его в практике является неудобным. Поэтому большее распространение получил алгебраический критерий устойчивости, сформулированный в 1895 году математиком А. Гурвицем. Этот критерий был найден Гурвицем по просьбе словацкого профессора Стодолы, занимавшегося исследованием процесса регулирования турбин.
Ниже критерий Гурвица приводится без доказательства.
Для характеристического уравнения (6.9) составим квадратную матрицу (таблицу) коэффициентов, содержащую п строк и п столбцов:
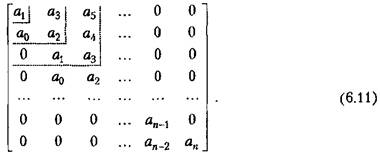
Эта таблица составляется следующим образом.
 . Каждая строка дополняется коэффициентами . Каждая строка дополняется коэффициентами
с нарастающими индексами слева направо так, чтобы чередовались строки с нечетными и четными индексами. В случае отсутствия данного коэффициента, а также если индекс его меньше нуля или больше п, на месте его пишется нуль.
 должны быть больше должны быть больше
нуля все п определителей Гурвица, получаемых из квадратной матрицы коэффициентов.
Определители Гурвица составяются по следующему правилу (см. (6.11)):
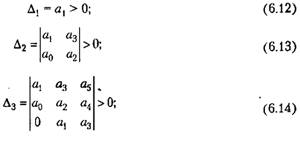
Последний определитель включает в себя всю матрицу. Но так как в последнем столбце матрицы все элементы, кроме нижнего, равны нулю, то последний определитель Гурвица выражается через предпоследний следующим образом:

 т. е. к положительности свободного члена характеристического уравнения. т. е. к положительности свободного члена характеристического уравнения.
 Первое условие соответствует границе устойчивости первого типа (апериодическая граница устойчивости) и второе — границе устойчивости второго типа (колебательная граница устойчивости). Первое условие соответствует границе устойчивости первого типа (апериодическая граница устойчивости) и второе — границе устойчивости второго типа (колебательная граница устойчивости).
Раскрывая определители, фигурирующие в общей формулировке критерия устойчивости Гурвица, можно получить в виде частных случаев критерии устойчивости для системы первого, второго, третьего, четвертого и более высоких порядков.
 порядка порядка
Для этого уравнения критерий Гурвица дает

т. е. коэффициенты характеристического уравнения должны быть положительными.
 порядка порядка
Для этого уравнения критерий Гурвица требует


Таким образом, и для уравнения второго порядка необходимым и достаточным условием устойчивости является положительность всех коэффициентов характеристического уравнения.
3. У р а в н е н и е третьего поря д к а

Для этого уравнения получаем условия




4. Уравнение четвертого порядка

На основании критерия Гурвица можно получить, что для уравнения четвертого порядка, кроме положительности всех коэффициентов, требуется выполнение условия

 пятого поря д к а пятого поря д к а
Для уравнения пятого порядка, кроме положительности всех коэффициентов, должны выполняться еще два условия:

Как видно, уже для уравнения пятой степени условия устойчивости но критерию Гурвица получаются достаточно громоздкими. Поэтому использование этого критерия практически ограничивается уравнениями четвертого порядка.
Существенным недостатком критерия Гурвица является также то, что для уравнений высоких порядков в лучшем случае можно получить ответ о том, устойчива или неустойчива система автоматического управления. При этом в случае неустойчивости системы критерий не дает ответа на то, каким образом надо изменить параметры системы, чтобы сделать ее устойчивой. Это обстоятельство привело к поискам других критериев, которые были бы более удобными в инженерной практике.
Для иллюстрации применения критерия Гурвица рассмотрим пример на определение устойчивости дистанционной следящей системы. Принципиальная и структурная схемы изображены на рис. 6.4. В качестве чувствительного элемента использованы два сельсина (СД и СП), включенные по трансформаторной схеме. Передаточная функция сельсинов равна коэффициенту передачи схемы:
 — электромеханическая постоянная времени двигателя совместно с оконечным каскадом усилителя. Передаточная функция редуктора (Р) равна его коэффициенту передачи, определяемому передаточным отношением: — электромеханическая постоянная времени двигателя совместно с оконечным каскадом усилителя. Передаточная функция редуктора (Р) равна его коэффициенту передачи, определяемому передаточным отношением:
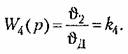
Так как цепь управления состоит из включенных последовательно звеньев, то передаточная функция разомкнутой цепи будет равна произведению передаточных функций отдельных звеньев:
 — общий коэффициент усиления разомкнутой цепи. — общий коэффициент усиления разомкнутой цепи.
Характеристическое уравнение:
 получаем получаем

В данном случае характеристическое уравнение имеет третий порядок. Нетрудно видеть, что условие положительности всех коэффициентов выполняется всегда, если выполнено условие К> О, что будет при правильном согласовании направления вращения двигателя со знаком рассогласования.
 накладываемое на коэффициенты характеристического уравнения, сводится при подстановке значений коэффициентов накладываемое на коэффициенты характеристического уравнения, сводится при подстановке значений коэффициентов
 , к неравенству , к неравенству
которое и является условием устойчивости рассматриваемой системы.
Из этого неравенства, в частности, можно заметить, что увеличение каждой постоянной времени сказывается отрицательно на устойчивости системы, так как при
этом снижается предельное значение общего коэффициента усиления к, при котором система еще остается устойчивой.
 измеряется датчиком угла (нотенциометрическим, индукционным или др.), установленным на гиростабилизированной платформе. Передаточная функция датчика измеряется датчиком угла (нотенциометрическим, индукционным или др.), установленным на гиростабилизированной платформе. Передаточная функция датчика
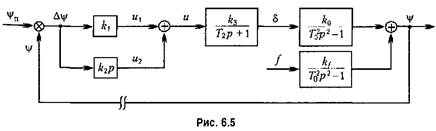
Для формирования алгоритма управления дополнительно устанавливается датчик угловой скорости (ДУС). Напряжение на его выходе пропорционально производной от отклонения. Передаточная функция ДУС в идеальном случае
 суммируются: суммируются:

 и производной от отклонения (см. § 2.2). Передаточная функция усилительно-преобразовательного устройства и производной от отклонения (см. § 2.2). Передаточная функция усилительно-преобразовательного устройства


 Его передаточная функция Его передаточная функция
где 8 — угол отклонения управляющих органов ракеты.
" Передаточная функция управляемого объекта (ракеты) по управляющему воздействию в простейшем случае может быть, например, такой:
Забиваем Сайты В ТОП КУВАЛДОЙ - Уникальные возможности от SeoHammer
Каждая ссылка анализируется по трем пакетам оценки: SEO, Трафик и SMM.
SeoHammer делает продвижение сайта прозрачным и простым занятием.
Ссылки, вечные ссылки, статьи, упоминания, пресс-релизы - используйте по максимуму потенциал SeoHammer для продвижения вашего сайта.
Что умеет делать SeoHammer
— Продвижение в один клик, интеллектуальный подбор запросов, покупка самых лучших ссылок с высокой степенью качества у лучших бирж ссылок.
— Регулярная проверка качества ссылок по более чем 100 показателям и ежедневный пересчет показателей качества проекта.
— Все известные форматы ссылок: арендные ссылки, вечные ссылки, публикации (упоминания, мнения, отзывы, статьи, пресс-релизы).
— SeoHammer покажет, где рост или падение, а также запросы, на которые нужно обратить внимание.
SeoHammer еще предоставляет технологию Буст, она ускоряет продвижение в десятки раз,
а первые результаты появляются уже в течение первых 7 дней.
Зарегистрироваться и Начать продвижение
Передаточная функция объекта по возмущению
Корни характеристического уравнения объекта
 свидетельствует о том, что сам объект свидетельствует о том, что сам объект
неустойчив, или, как говорят, статически неустойчив. Он ведет себя подобно шару на рис. 6.1, б. Иными словами, при малейшем отклонении, вызванном, например, возмущающим воздействием, стартующая вертикально ракета без системы автоматического управления опрокидывается.
Передаточная "функция разомкнутой системы равна произведению передаточных функций, входящих в контур отточки размыкания до точки размыкания (см. рис. 6.5):

 в указанный контур не входит. в указанный контур не входит.
 т. е. разомкнутая система неустойчива. т. е. разомкнутая система неустойчива.
Характеристическое уравнение замкнутой системы можно получить, приравняв нулю сумму полиномов числителя и знаменателя передаточной функции разомкнутой системы:

 Таким образом, необходимыми и достаточными условиями устойчивости замкнутой системы будут: Таким образом, необходимыми и достаточными условиями устойчивости замкнутой системы будут:

Первое из них при выполнении двух других всегда выполняется. Следует обратить внимание па то, что если бы управление осуществлялось только по отклонению
 т. е. являлась бы структурно неустойчивой. т. е. являлась бы структурно неустойчивой.
 — на колебательной границе, — на колебательной границе,
|

