Теория систем автоматического управленияУравнения систем с нелинейностью в виде сухого трения и зазора
Приведем примеры составления уравнений для нелинейных систем с сухим трением или зазором в механической передаче.
 (рис. 16.19). Следовательно, теперь уравнение управляемого объекта примет вид (рис. 16.19). Следовательно, теперь уравнение управляемого объекта примет вид

 — угол поворота вала управляемого объекта, причем — угол поворота вала управляемого объекта, причем

 . Здесь возможны два варианта: . Здесь возможны два варианта:

 (или (или
 будет принимать все время определенные значения будет принимать все время определенные значения

 и превысит его. и превысит его.
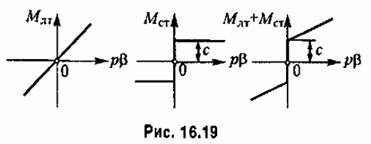

Итак, уравнение управляемого объекта, как нелинейного звена системы, согласно (16.48) и (16.49) с учетом (16.50) будет иметь вид

 . .
 равнялось бы Р, и характеристикой была бы прямая под углом 45°, изображенная на рис. 16.20, б штрих пунктиром. Вследствие шора при движений в сторону возрастания угла (3 эта прямая сдвинется вправо на равнялось бы Р, и характеристикой была бы прямая под углом 45°, изображенная на рис. 16.20, б штрих пунктиром. Вследствие шора при движений в сторону возрастания угла (3 эта прямая сдвинется вправо на
 (поводок при- (поводок при-
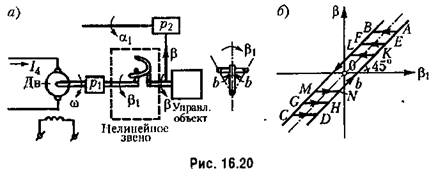
жмстся к правой стороне
 или ЕР, или ЕР,
 в ото время). Затем в ото время). Затем
начнет двигаться и вилка, что будет соответствовать прямой ВС, сдвинутой влево от начала координат на величину b.
 не считая того отставания, которое будет еще из-за нагрузки. не считая того отставания, которое будет еще из-за нагрузки.
Уравнение управляемого объекта, включавшее в себя и двигатель, теперь разобьется на два нелинейных. Первое нелинейное уравнение управляемого объекта с двигателем будет (ограничиваемся учетом одной постоянной времени)

(соответственно с поводком, прижатым к вилке, и с поводком, свободно движущимся
 — момент инерции управляемого — момент инерции управляемого
объекта. Кроме этого, надо написать второе уравнение нелинейного звена с зазором, соответствующее характеристике рис. 16.20, б:

Следовательно, управляемый объект будет иметь остановки при своих колебаниях, соответствующие участкам АВ, СD и т. д. характеристики рис. 16.20,6.
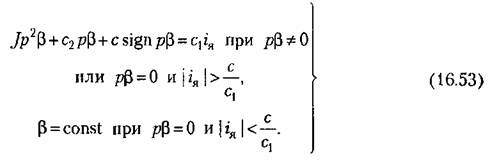
Линейная часть системы остается такой же, как в предыдущем примере, т. е. (16.53).

 (рис. 16.21,я) и могущая принимать любые значения во время остановки, т. е. (рис. 16.21,я) и могущая принимать любые значения во время остановки, т. е.


В результате после перехода к безразмерным относительным отклонениям (14.27)
и (14.48) получим вместо (14.47) следующее уравнение чувствительного элемента как нелинейного звена:
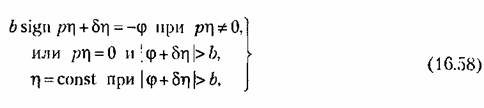
 — номинальное давление в камере. — номинальное давление в камере.
 — отрезкам АВ, CD, ЕF, СИ и т. п. на рис. 16.21, б. Из сравнения рис. 16.21, 6 и рис. 16.20, 6 видно, что сухое трение в таком нелинейном звене (без массы) эквивалентно зазору, половина которого равна Ь, чего совершенно нельзя сказать о сухом трении в следящей системе, где учитывалась масса (момент инерции), — отрезкам АВ, CD, ЕF, СИ и т. п. на рис. 16.21, б. Из сравнения рис. 16.21, 6 и рис. 16.20, 6 видно, что сухое трение в таком нелинейном звене (без массы) эквивалентно зазору, половина которого равна Ь, чего совершенно нельзя сказать о сухом трении в следящей системе, где учитывалась масса (момент инерции),

|

